 作者投稿
作者投稿 专家审稿
专家审稿 编辑办公
编辑办公

Development of a 3D Online Self Calibration Device for Industrial Robots
-
摘要: 针对工业机器人校准成本与校准精度难以平衡的问题,研究了一种针对工业机器人的三维低成本高精度接触式自校系统。该系统的三维校准器安装于机器人末端位置(TCP),采用三个互相正交的高精度位置传感器,通过研究工业机器人D-H参数校准算法,并对专用四球校准台精密迭代测量,可实现对工业机器人D-H参数的低成本、高精度在线自校准。通过与激光跟踪仪进行验证试验,各测量点的最大En值为0.63,小于1,验证结果满意。Abstract: Aiming at the problem of balancing the cost and accuracy in calibration of industrial robots, a low-cost three-dimensional high-precision contact self-calibration system for industrial robots was developed. The three-dimensional calibrator is installed in the end position of the robot (TCP). Using three orthogonal high-precision position sensors, the D-H parameters of industrial robots can be calibrated online with low cost and high precision by the calibration algorithm of D-H parameters of industrial machines and precise iterative measurement of a special four ball calibration table. A comparison with a laser tracker showed that the maximum En value of each measurement point was 0.63 and the comparison result was satisfactory.
-
Key words:
- metrology /
- industrial robot /
- online self calibration /
- high-precision /
- three dimensional calibrator
-
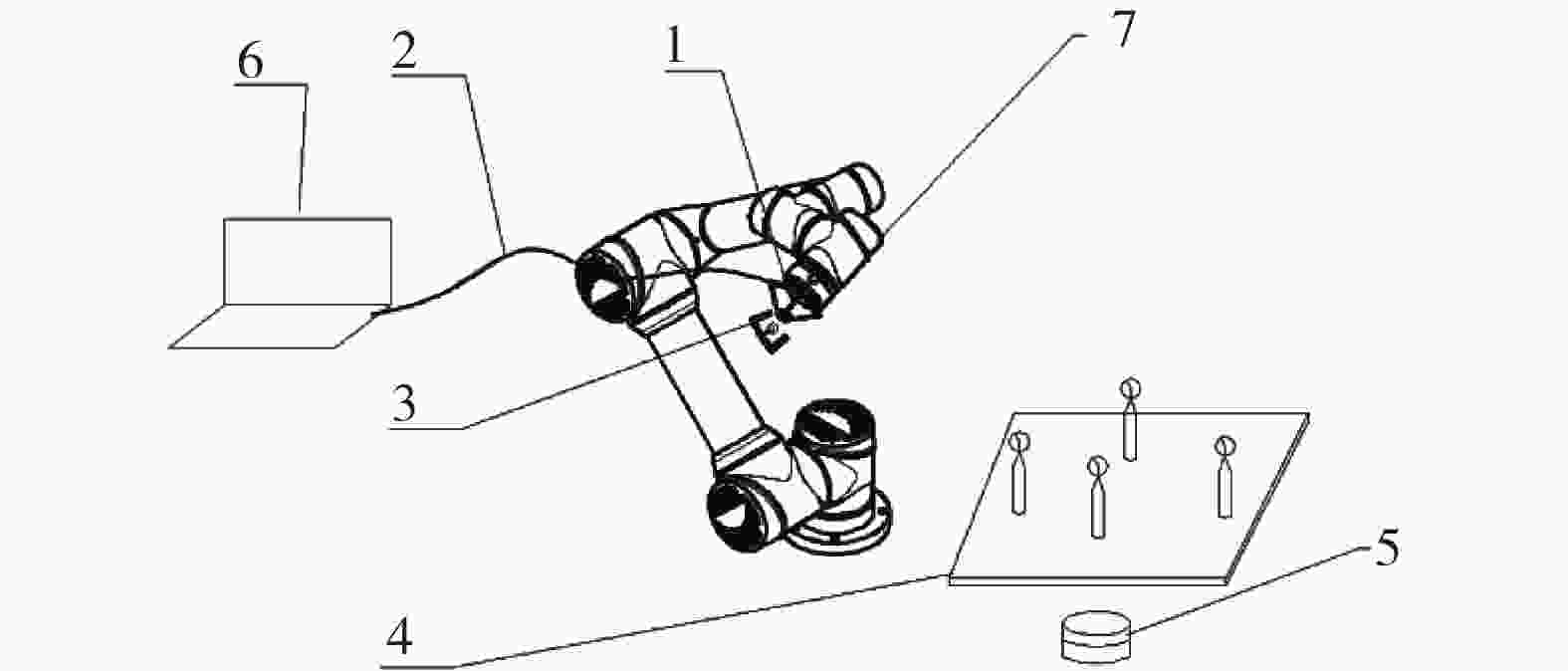
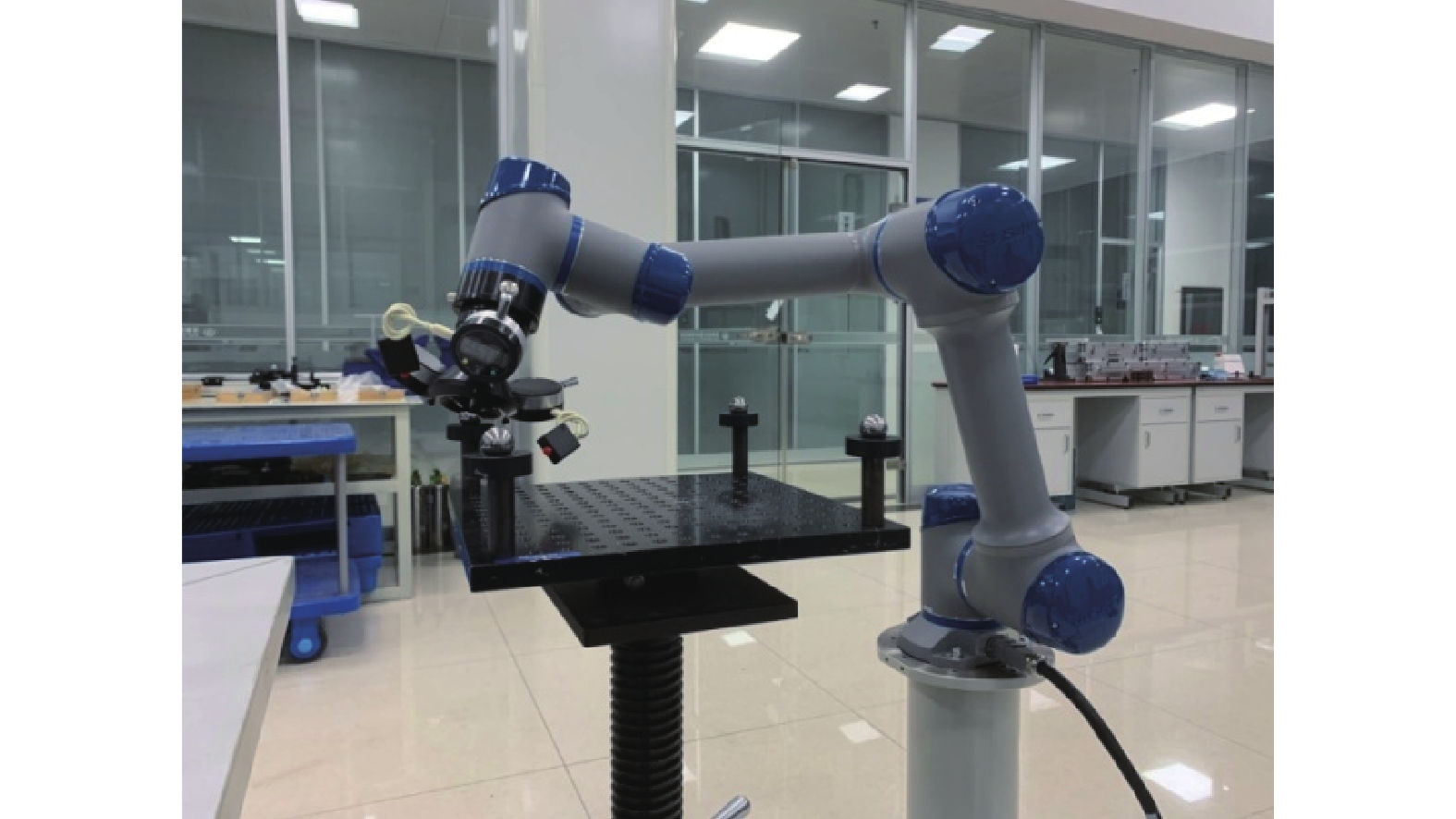
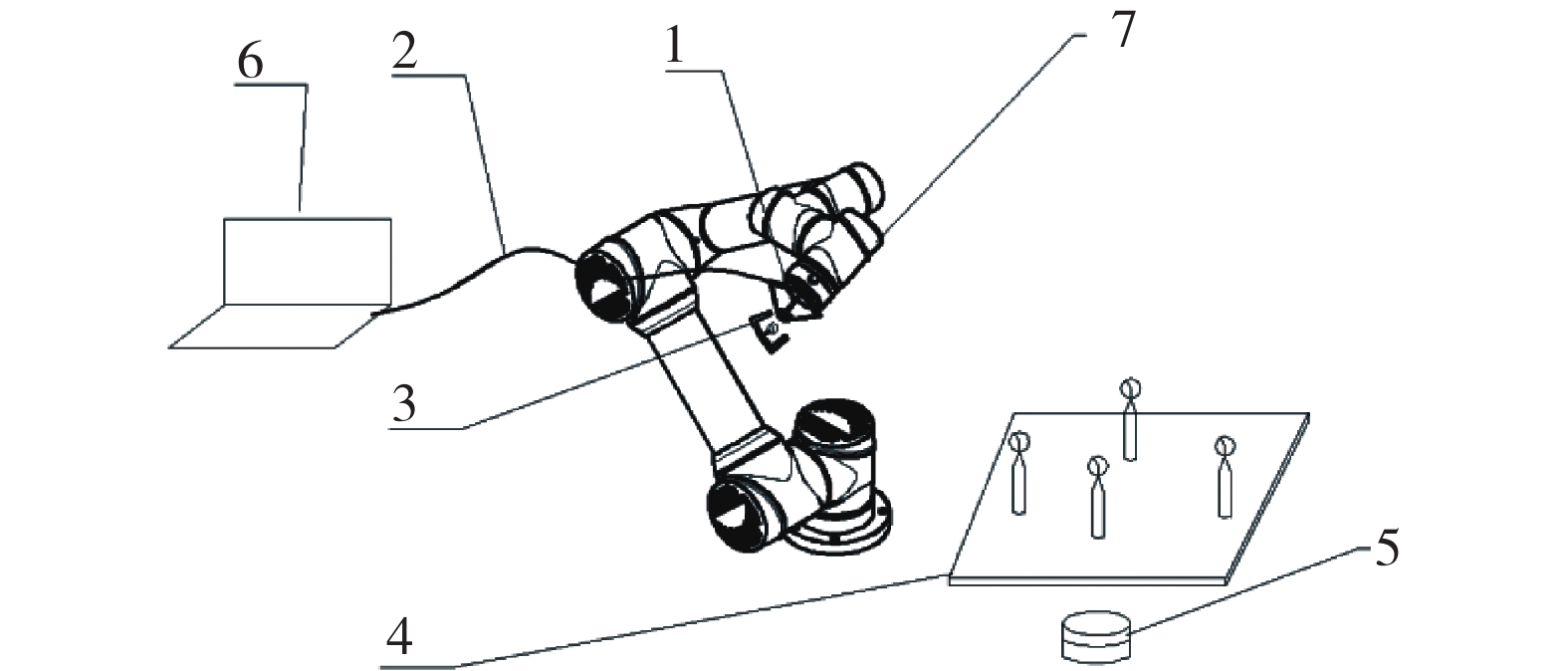
图 1 系统结构
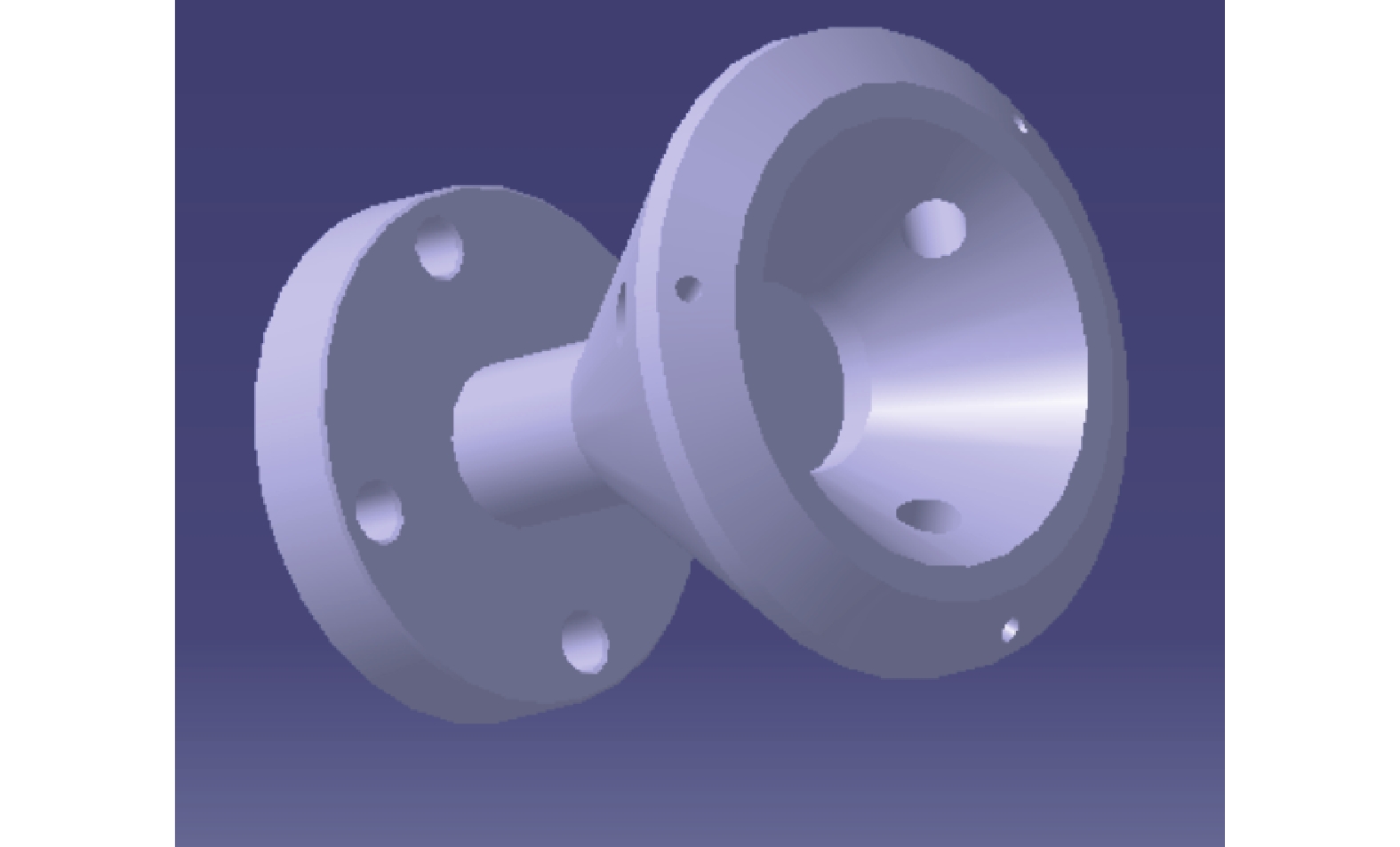
1.三维校准器;2.传感器数据传输线缆;3.零位快速定位夹具;4.四球校准台;5.三维角度调整器;6.控制电脑;7.被校准工业机器人
Figure 1. System structure
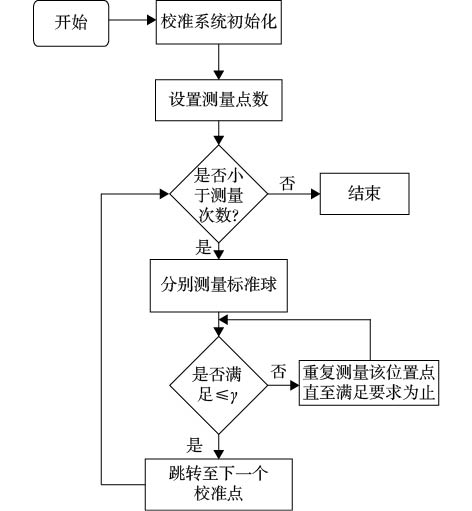
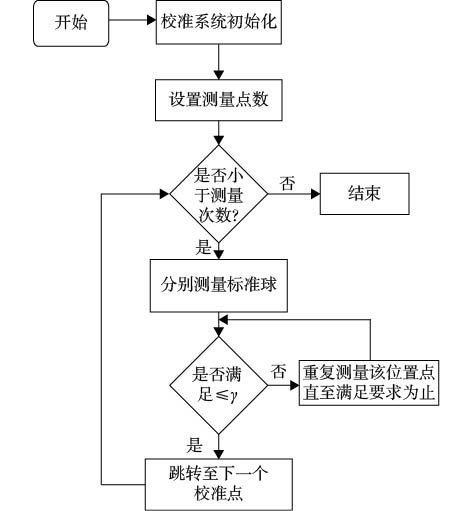
图 4 工业机器人D-H参数校准方法步骤
Figure 4. Steps of D-H parameter calibration method for industrial robots
表 1 D-H 运动学和非运动学误差模型
Table 1. D-H kinematic and non kinematic error models
i αi-1/° a i-1/mm di/mm θi/° 1 0 0 d1 θ1 2 −90+δα1 δa1 0 θ2−90+δθ2+c2γ2 3 δα2 a3+δa2 δd3 θ3+δθ3+c3γ3 4 −90+δα3 a4+δa3 d4+δd4 θ4+δθ4+c4γ4 5 90+δα4 δa4 δd5 θ5+δθ5+c5γ5 6 −90+δα5 δa5 d6 θ6+180+c6γ6  下载: 导出CSV
下载: 导出CSV
表 2 D-H 新松6轴机器运动学和非运动学误差模型
Table 2. Kinematic and non kinematic error models for a D-H Xinsong 6-axis machine
i αi-1/° a i-1/mm di/mm θi/° 1 0 0 290 θ1 2 −90+δα1 δa1 0 θ2−90+δθ2+c2γ2 3 δα2 270+δa2 δd3 θ3+δθ3+c3γ3 4 −90+δα3 70+δa3 302+δd4 θ4+δθ4+c4γ4 5 90+δα4 δa4 δd5 θ5+δθ5+c5γ5 6 −90+δα5 δa5 72 θ6+180+c6γ6
下载: 导出CSV
表 3 新松6轴机器人的初始参数
Table 3. Initial parameters of the Xinsong 6-axis robot
初始参数 标称值 x0 153.507 mm+δx0 y0 −256.442 mm+δy0 z0 −228.116 mm+δz0 α0 90.487°+δα0 β0 −1.054°+δβ0 φ0 −0.165°+δφ0 xt 149.679 mm+δxt yt 1.859 mm+δyt zt 120.806 mm+δzt αt 0.000° βt 90.000° φt 0.000°
下载: 导出CSV
-
[1] 任瑜, 张丰, 郭志敏, 等. 利用Leica激光跟踪仪对工业机器人现场标定的方法[J]. 计量技术, 2019, 543(11): 64-68. [2] 温秀兰, 崔俊宇, 芮平, 等. 激光跟踪仪现场校准设备相关问题探讨[J]. 计量技术, 2017, 523(1): 36-38. [3] 班朝, 任国营, 王斌锐, 等. 融合加权SVD算法的工业机器人运动学标定[J]. 计量学报, 2021, 42(9): 1128-1135. doi: 10.3969/j.issn.1000-1158.2021.09.02 [4] 张春涛, 王勇. 工业机器人六维力传感器在线标定方法研究[J]. 电子测量与仪器学报, 2021, 35(6): 161-168. [5] 董成举, 刘文威, 李小兵, 等. 六轴工业机器人工作空间分析及区域性能研究[J]. 中国测试, 2020, 44(5): 154-160. doi: 10.11857/j.issn.1674-5124.2019120013 [6] 李定坤, 叶声华, 任永杰, 等. 机器人定位精度标定技术的研究[J]. 计量学报, 2007, 28(3): 224-227. [7] 张湧涛, 金爽, 王一. 多传感信息融合机器人标定方法[J]. 中国测试, 2018, 42(4): 56-62. [8] 陈烨. S-R-S型七自由度串联机器人约束条件下的定位误差分析与补偿[D]. 南京: 南京邮电大学, 2019. [9] 李定坤, 叶声华, 任永杰, 等. 机器人末端工具参数自动标定方法[J]. 哈尔滨工业大学学报, 1998, 30(3): 74-76. [10] 任永杰, 邾继贵, 杨学友, 等. 基于距离精度的测量机器人标定模型及算法[J]. 计量学报, 2008, 29(3): 198-202. [11] 魏霖. 关节式坐标测量机标定的研究[D]. 武汉: 华中科技大学, 2006. [12] Ahmed Joubair, Albert Nubiola, IlianBonev. Calibration Efficiency Analysis Based on Five Observability Indices and Two Calibration Models for a Six-Axis Industrial Robot[J]. SAE International, 2013(6): 161-168. [13] Joubair A , Slamani M , Bonev I A. Kinematic calibration of a five-bar planar parallel robot using all working modes[J]. Robotics and Computer-Integrated Manufacturing, 2013, 29(4): 15-25. doi: 10.1016/j.rcim.2012.10.002 [14] 于连栋, 程文涛, 费业态. 基于激光跟踪仪的关节式坐标测量机参数标定[J]. 中国科学技术大学学报, 2009, 39(12): 1329-1331. [15] 国家质量监督检验检疫总局. 工业机器人性能规范及其试验方法: GB/T 12642-2013 [S]. 北京, 2014. -


 点击查看大图
点击查看大图
计量
- 文章访问数: 661
- HTML全文浏览量: 345
- PDF下载量: 74
- 被引次数: 0

