 作者投稿
作者投稿 专家审稿
专家审稿 编辑办公
编辑办公

Design of Vehicle Terminal Calibration System and Positioning Error Correction
-
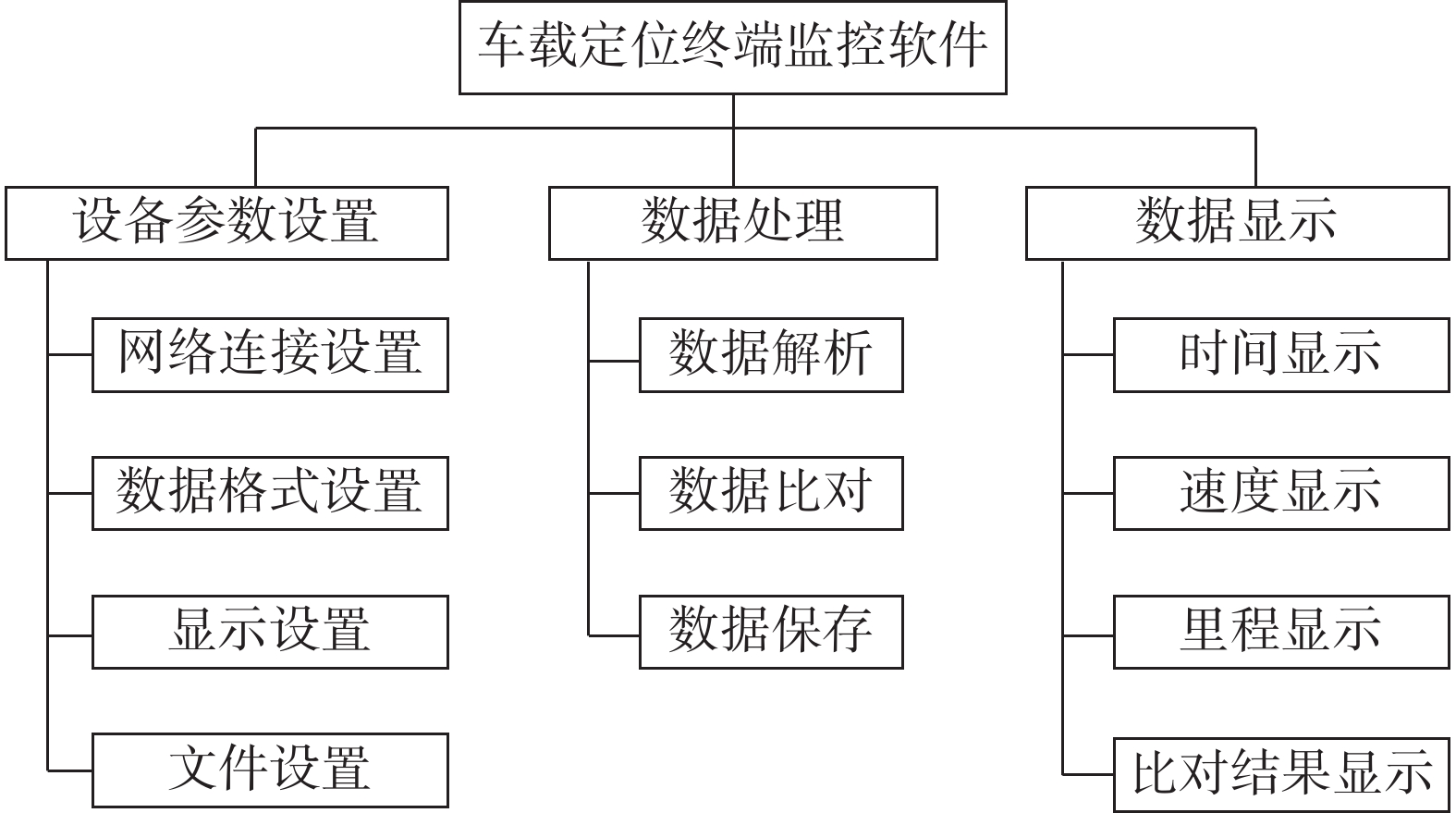
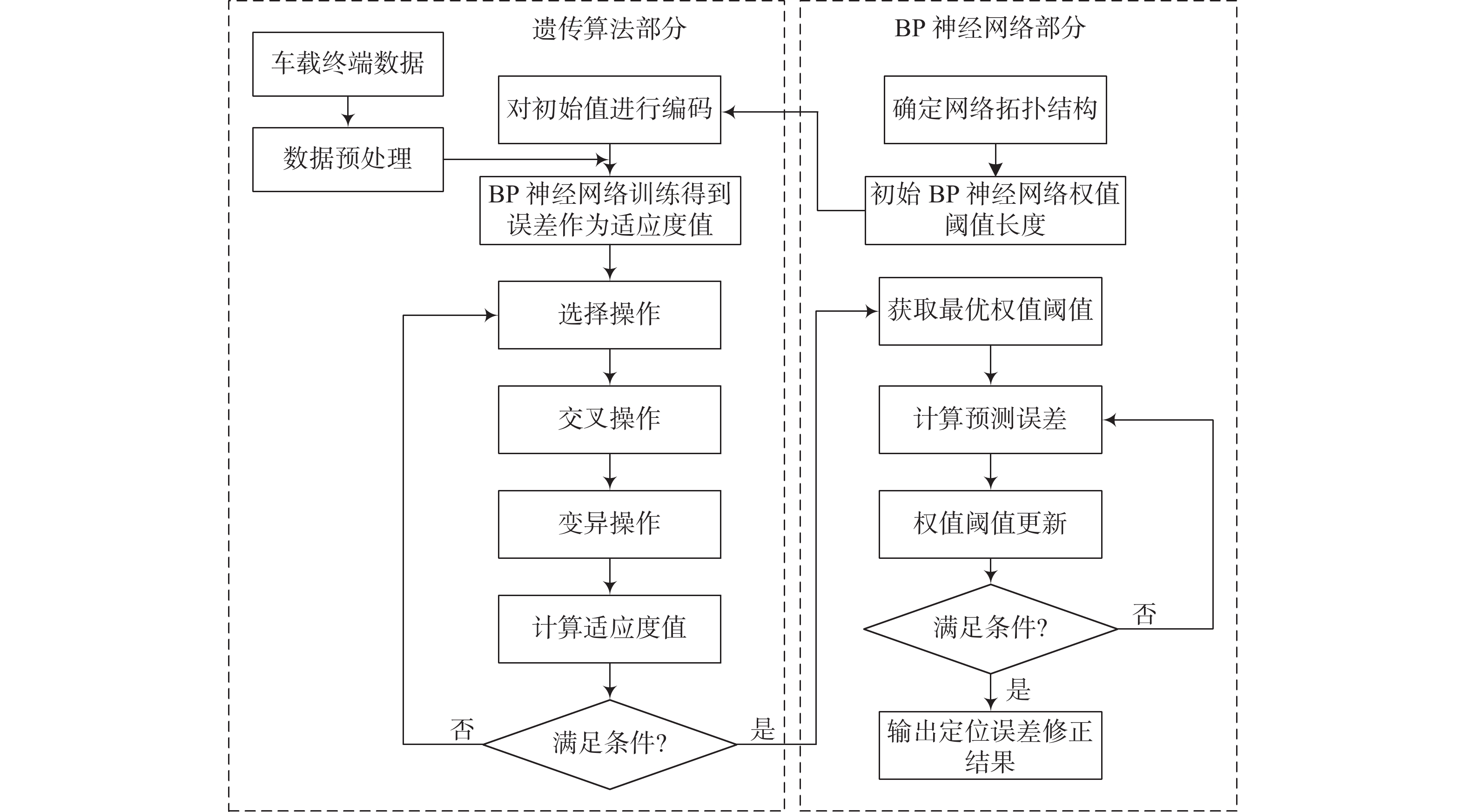
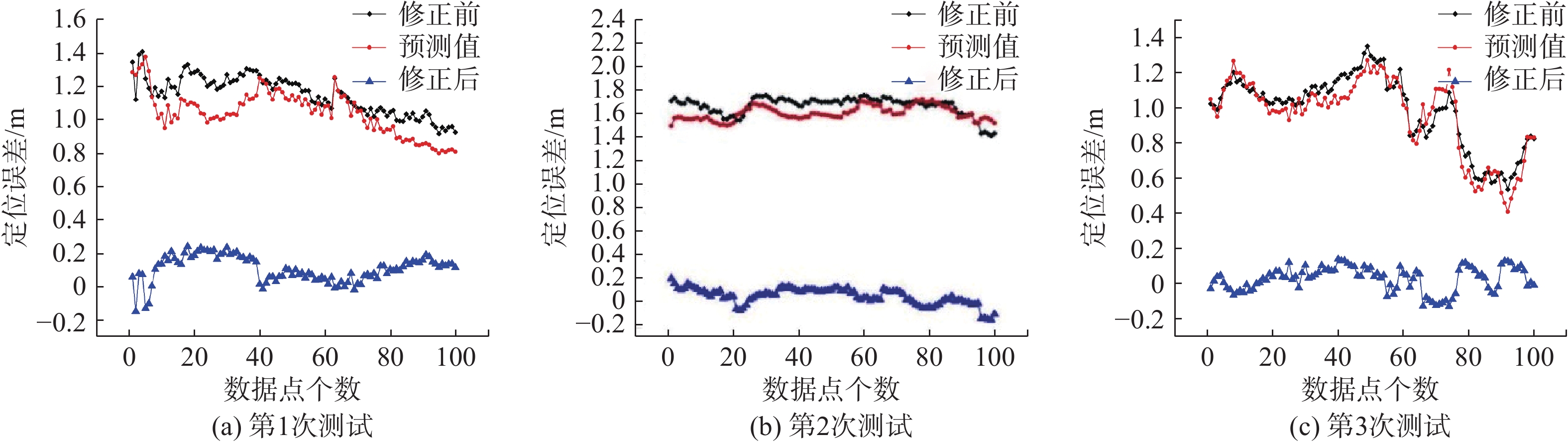
摘要: 近年来,道路运输业得到了快速发展,在提高车辆运输效率和运载能力的同时,也需要加强对运输车辆的安全管理,实时监控其行驶路线和行驶状态,目前车载终端存在定位误差和信息更新缓慢等问题。研制了一套道路运输车辆卫星定位终端计量标准系统,通过同时测量定位终端计量标准系统与车载终端在不同速度下的位移信息和速度信息,得到车载终端的定位误差。提出了基于遗传算法和BP神经网络相结合的道路运输车辆车载终端定位误差修正方法,对比车载终端3次测量数据修正前后的定位误差,最大定位误差分别减小了82.79%、87.95%和89.55%。实验结果表明,利用BP神经网络建立的车载终端定位误差模型是有效的,定位误差修正效果良好。Abstract: In recent years, the road transportation industry has witnessed significant advancements. While there have been improvements in vehicle transport efficiency and cargo capacity, there is a paramount need to enhance the safety management of transport vehicles by monitoring their routes and conditions in real time. Current vehicle terminal calibration systems exhibit significant positioning errors and sluggish information updates. This paper introduces a developed calibration system for satellite positioning of road transport vehicles. Through simultaneous measurement of displacement and speed data from both the calibration system and the vehicle terminal at varying speeds, the positioning discrepancies of the vehicle terminal were discerned. An innovative correction method, integrating genetic algorithms with a BP neural network, was proposed to rectify these errors. By comparing positioning data pre and post-correction, we observed maximum error reductions of 82.79%, 87.95%, and 89.55% respectively. Experimental outcomes affirm the efficacy of the BP neural network-based positioning error model, demonstrating substantial error correction capabilities.
-

图 1 车载终端计量标准系统结构图
Figure 1. Structure diagram of the vehicle terminal calibration system

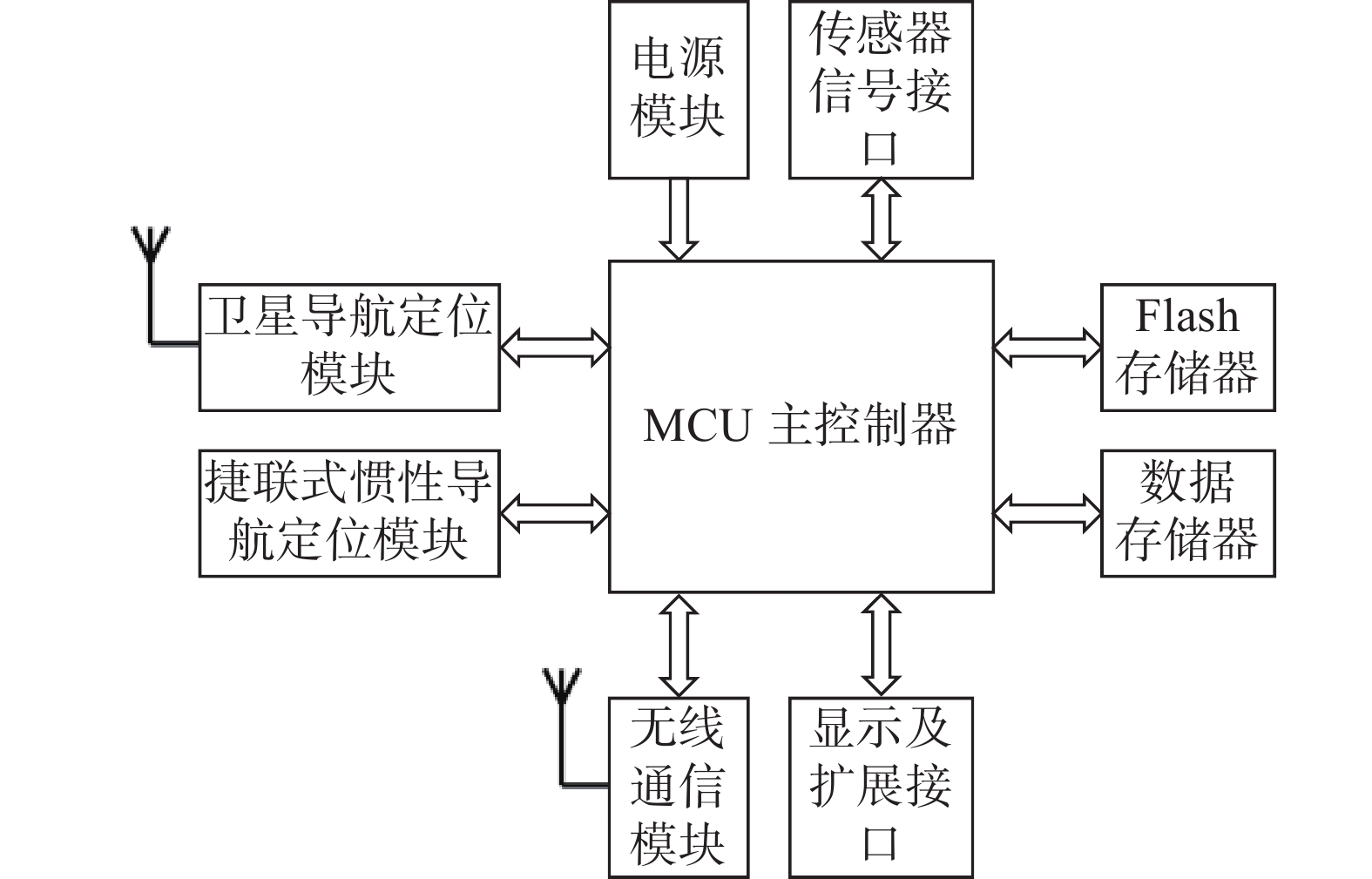
图 2 车载终端智能计量标准系统架构
Figure 2. Architecture of the intelligent calibration system for vehicle terminals

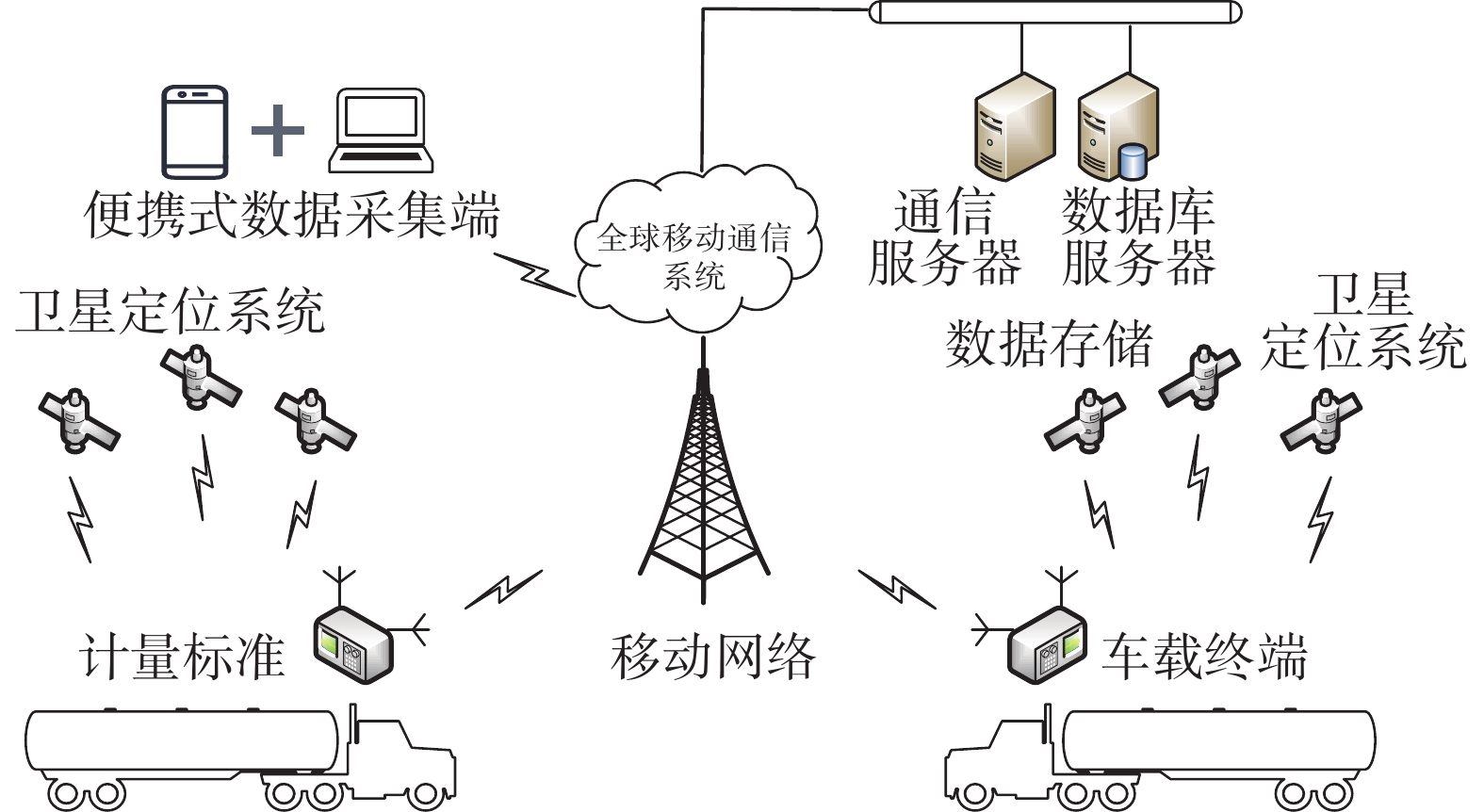
图 3 车载终端计量标准系统软件功能架构图
Figure 3. Functional architecture of the software for the vehicle terminal calibration system

图 5 遗传算法优化BP神经网络流程图
Figure 5. Optimization process using a genetic algorithm for the BP neural network

图 6 修正前后车载终端的定位误差
Figure 6. Positioning errors of the vehicle terminal before and after correction
表 1 车载终端数据
Table 1. Vehicle terminal data
序号 定位时间 速度(km/h) 经度 纬度 1 14:21:49 64 −2625747.128 −1648533.485 2 14:21:59 66 −2625745.305 −1648532.724 3 14:22:09 62 −2625742.667 −1648530.876 4 14:22:14 62 −2625740.968 −1648528.085 5 14:22:29 61 −2625741.326 −1648525.498 6 14:22:34 60 −2625742.876 −1648523.213 7 14:22:44 82 −2625744.627 −1648520.606 8 14:22:59 85 −2625746.613 −1648517.444 9 14:23:04 86 −2625748.864 −1648513.491 10 14:23:09 83 −2625751.35 −1648508.982 11 14:23:19 88 −2625754.041 −1648503.963 12 14:23:24 87 −2625756.851 −1648498.571 13 14:23:34 86 −2625759.75 −1648492.852 14 14:23:44 81 −2625765.903 −1648480.487 15 14:23:49 103 −2625769.181 −1648473.983 16 14:23:59 105 −2625772.573 −1648467.296 17 14:24:04 104 −2625776.077 −1648460.615 18 14:24:19 100 −2625779.499 −1648453.882 19 14:24:34 106 −2625782.837 −1648447.097 20 14:24:39 101 −2625786.205 −1648440.267 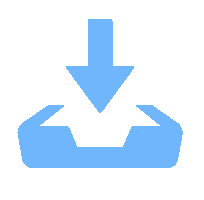 下载: 导出CSV
下载: 导出CSV
表 2 修正前后车载终端最大定位误差及减小百分比
Table 2. Maximum positioning errors and their percentage reductions for the vehicle terminal pre and post-correction
测试序号 修正前/m 修正后/m 减小百分比 第1次 1.4143 0.2423 82.79% 第2次 1.8480 0.2226 87.95% 第3次 1.3555 0.1416 89.55%
下载: 导出CSV
-
[1] 张霄霄, 庞瑶. 基于卫星模拟仿真平台的导航产品测试技术研究[J]. 现代电子技术, 2012, 35(10): 115-117. doi: 10.3969/j.issn.1004-373X.2012.10.037 [2] 许江涛, 庞尚益, 吴学文, 等. 基于信号模拟器的BDS导航定位产品检测中心建设[J]. 导航定位学报, 2015, 3(4): 22-26. doi: 10.16547/j.cnki.10-1096.20150405 [3] 牛锋, 何龙标, 秦朝琪, 等. 机动车鸣笛抓拍中的计量问题[J]. 计量技术, 2020(4): 3-5. [4] 解晶. 基于高速火箭撬的GNSS接收机定位精度评估方法研究[J]. 现代导航, 2017, 8(1): 1-4. [5] 福建省计量科学研究院. 卫星定位系统车载终端测速装置: JJG(闽)1045-2011 [S]. 福建: 福建省质量技术监督局, 2011. [6] 刘安军. 利用软件算法改善车载终端GPS定位漂移的问题[J]. 电子技术与软件工程, 2023, 243(1): 47-51. [7] Wu D, Huang S, Xin J. Dynamic compensation for an infrared thermometer sensor using least-squares support vector regression (LSSVR) based functional link artificial neural networks (FLANN)[J]. Measurement Science and Technology, 2008, 19(10): 105202. doi: 10.1088/0957-0233/19/10/105202 [8] 何春茂, 崔中, 苏旭, 等. 基于最小二乘法的机床螺距误差补偿方法研究[J]. 机械管理开发, 2023, 38(1): 4-7. doi: 10.16525/j.cnki.cn14-1134/th.2023.01.002 [9] 王伟斌, 邱长泉. 基于最小二乘曲线拟合的信号调理电路误差补偿方法[J]. 计算机测量与控制, 2009, 17(11): 2286-2288, 2291. doi: 10.16526/j.cnki.11-4762/tp.2009.11.060 [10] 宋成, 王飞雪, 庄钊文. 基于遗忘因子最小二乘的GPS接收机钟差预测算法研究[J]. 测绘科学, 2008, 33(S1): 41-43, 59. [11] 张兰勇, 陈辉煌, 孟坤. 消除模型误差的卡尔曼滤波在GPS定位中的应用研究[J]. 兵器装备工程学报, 2018, 39(1): 136-140. doi: 10.11809/bqzbgcxb2018.01.030 [12] 陈柯勋, 邱伟. 一种基于改进卡尔曼滤波的GPS/BDS/SINS深组合定位算法[J]. 太原理工大学学报, 2020, 51(3): 446-450. doi: 10.16355/j.cnki.issn1007-9432tyut.2020.03.018 [13] 李亚军, 向阳, 刘研, 等. 基于卡尔曼滤波的播种机GPS测速数据优化算法研究[J]. 中国农机化学报, 2020, 41(1): 148-154. doi: 10.13733/j.jcam.issn.2095-5553.2020.01.27 [14] 姜佰辰, 关键, 周伟, 等. 基于多项式卡尔曼滤波的船舶轨迹预测算法[J]. 信号处理, 2019, 35(5): 741-746. doi: 10.16798/j.issn.1003-0530.2019.05.002 [15] 高为广, 杨元喜, 张婷. 神经网络辅助的GPS/INS组合导航自适应滤波算法[J]. 测绘学报, 2007(1): 26-30. doi: 10.3321/j.issn:1001-1595.2007.01.005 [16] 张静娴, 杨英东, 钱峰. 基于卡尔曼滤波-神经网络预测的GNSS/INS误差反馈校正的研究[J]. 电子设计工程, 2015, 23(10): 103-105. doi: 10.3969/j.issn.1674-6236.2015.10.032 [17] 林健, 汪木兰, 李宏胜. 基于遗传神经网络的直线伺服系统定位误差补偿[J]. 组合机床与自动化加工技术, 2011(2): 86-88, 92. doi: 10.3969/j.issn.1001-2265.2011.02.024 [18] 郭晓晶, 田华, 李明君. 基于卡尔曼滤波算法的采煤机惯导定位方法[J]. 煤炭技术, 2015, 34(7): 278-280. doi: 10.13301/j.cnki.ct.2015.07.105 [19] 王虎, 王解先, 白贵霞, 等. 改进的渐消卡尔曼滤波在GPS动态定位中的应用[J]. 同济大学学报(自然科学版), 2011, 39(1): 124-128. doi: 10.3969/j.issn.0253-374x.2011.01.024 [20] 岑志波, 周盛薇, 周娟. 基于改进BP神经网络的远传水表示值误差补偿方法[J]. 中国计量大学学报, 2023, 34(2): 172-178. doi: 10.3969/j.issn.2096-2835.2023.02.002 [21] 江苏省计量科学研究院. 道路运输车辆卫星定位系统车载终端校准规范: JJF(苏)192-2021 [S]. 江苏: 江苏省市场监督管理局, 2021. [22] 王亚春. 北斗无源定位技术的研究与实现[D]. 合肥: 安徽大学, 2012. [23] 谢鹏. 惯性导航和卫星导航的组合导航技术研究[D]. 北京: 北京理工大学, 2006. [24] 郝志涛. 北斗卫星导航系统发展与应用[J]. 电子技术与软件工程, 2017(7): 34-36. [25] 杨新状, 许承东, 李怀建, 等. SINS/GPS组合导航计算机系统设计与开发[J]. 弹箭与制导学报, 2004(1): 34-36. doi: 10.3969/j.issn.1673-9728.2004.01.012 [26] 吕东, 王虹, 张萌, 等. 基于MEMS器件的捷联惯性导航定位方法研究[J]. 微波学报, 2021, 37(1): 233-236. [27] 叶文, 蔡晨光, 杨平, 等. 惯性技术计量领域若干问题的思考与展望[J]. 计量科学与技术, 2021, 65(3): 9-14, 52. [28] 蒋继乐, 吴鲲, 郭斌, 等. 应用于惯性导航系统中的扭矩计量技术研究[J]. 计量科学与技术, 2021(2): 59-62, 75. [29] 刘小平, 鄂东辰, 高强, 等. 基于BP神经网络的翻车机液压系统故障诊断[J]. 液压与气动, 2016, 300(8): 68-73. doi: 10.11832/j.issn.1000-4858.2016.08.013 [30] 李文华, 牛国波, 刘羽佳. 基于遗传算法优化BP神经网络的液压系统故障诊断[J]. 机床与液压, 2023, 51(8): 159-164. doi: 10.3969/j.issn.1001-3881.2023.08.026 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 293
- HTML全文浏览量: 117
- PDF下载量: 44
- 被引次数: 0

