 作者投稿
作者投稿 专家审稿
专家审稿 编辑办公
编辑办公

Enhancing Vehicle Terminal Positioning Accuracy Using Neural Network and Lagged Variable Regression
-
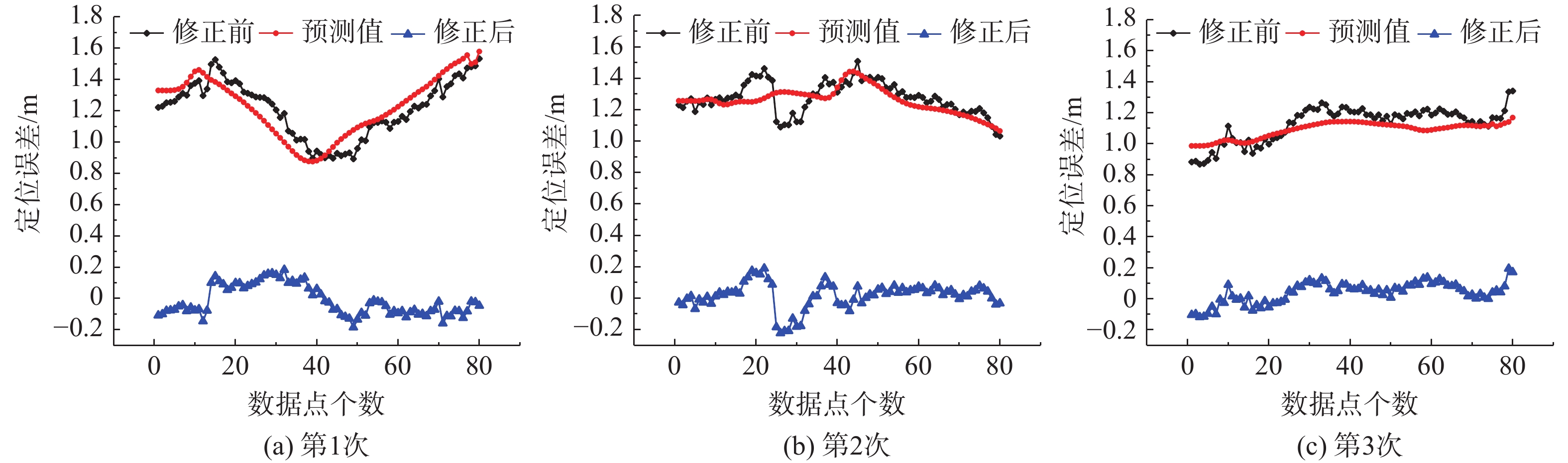
摘要: 针对现有车载定位终端存在定位误差大和更新速度慢的问题,深入分析了车载终端定位误差的影响因素,并提出了基于BP神经网络和滞后变量回归的车载终端定位误差修正方法。对比车载终端三次测量数据修正前后的定位误差,最大定位误差分别减小了88.2%、85.4%和85.8%。通过实测数据对比了车载终端修正前后的定位误差,证明了使用BP神经网络和滞后变量回归建立的车载终端定位误差模型是有效的,定位误差修正效果较好。Abstract: The existing onboard positioning terminals face challenges of significant positioning errors and slow update speeds. This paper analyzes the factors influencing these errors and proposes a method for correcting vehicle terminal positioning errors using a BP neural network and lagged variable regression. Comparative analysis of three measurement data sets before and after correction shows maximum positioning error reductions of 88.2%, 85.4%, and 85.8%, respectively. Additionally, the comparison of pre- and post-correction positioning errors with measured data validates the effectiveness of the developed model utilizing BP neural networks and lagged variable regression for positioning error correction.
-

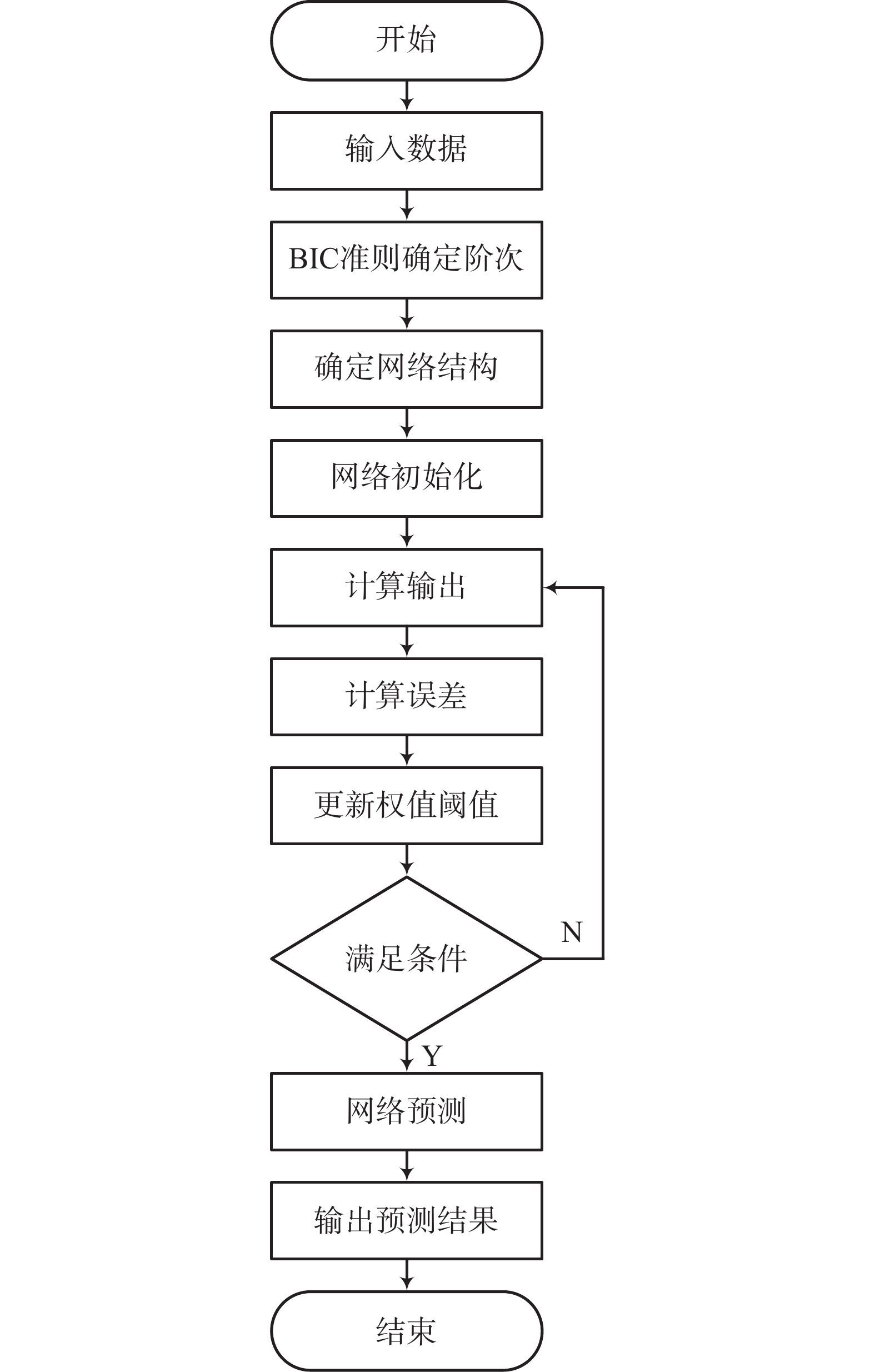
图 3 BP神经网络和滞后变量回归的建模流程图
Figure 3. Modeling flow chart of BP neural network and lagged variable regression

图 4 修正前后车载终端的定位误差
Figure 4. Positioning error of the vehicle terminal before and after correction
表 1 修正前后车载终端的最大定位误差及减小百分比
Table 1. Maximum positioning error of the vehicle terminal before and after correction
测试序号 修正前/m 修正后/m 减小百分比 第1次 1.53 0.18 88.2% 第2次 1.51 0.22 85.4% 第3次 1.34 0.19 85.8%  下载: 导出CSV
下载: 导出CSV
表 2 本文方法与多项式拟合方法减小百分比对比
Table 2. Comparison of percentage reduction between the proposed method and polynomial fitting method
测试序号 本文方法 多项式拟合方法 第1次 88.2% 43.8% 第2次 85.4% 32.8% 第3次 85.8% 39.1%
下载: 导出CSV
-
[1] 柯贤亮. 车载北斗/GPS组合定位终端的研究[D]. 福州: 福州大学, 2016. [2] 郝志涛. 北斗卫星导航系统发展与应用[J]. 电子技术与软件工程, 2017(7): 34-36. [3] 谢鹏. 惯性导航和卫星导航的组合导航技术研究[D]. 北京: 北京理工大学, 2006. [4] 周俊, 王琳, 徐永强, 等. 惯性导航与卫星导航组合定位精度分析及仿真[J]. 无线电工程, 2018, 48(12): 1086-1090. doi: 10.3969/j.issn.1003-3106.2018.12.14 [5] 张霄霄, 庞瑶. 基于卫星模拟仿真平台的导航产品测试技术研究[J]. 现代电子技术, 2012, 35(10): 115-117. doi: 10.3969/j.issn.1004-373X.2012.10.037 [6] 许江涛, 庞尚益, 吴学文, 等. 基于信号模拟器的BDS导航定位产品检测中心建设[J]. 导航定位学报, 2015, 3(4): 22-26. doi: 10.16547/j.cnki.10-1096.20150405 [7] GUO L, JIN C, LIU G. Evaluation on measurement performance of low-cost GNSS receivers[C]. IEEE, 2017. [8] 解晶. 基于高速火箭撬的GNSS接收机定位精度评估方法研究[J]. 现代导航, 2017, 8(1): 1-4. [9] 朱肖光. 基于真实场景回放的导航接收机测试评估方法研究[D]. 上海: 上海交通大学, 2017. [10] 福建省计量科学研究院. 卫星定位系统车载终端测速装置: JJG(闽)1045-2011 [S]. 福建: 福建省质量技术监督局, 2011. [11] 张建. 卫星定位车载终端校准方法探讨[J]. 工业计量, 2022, 32(1): 17-19,22. [12] 江苏省计量科学研究院. 道路运输车辆卫星定位系统车载终端校准规范: JJF(苏)192-2021 [S]. 江苏: 江苏省质量技术监督局, 2021. [13] Wu D, Huang S, Xin J. Dynamic compensation for an infrared thermometer sensor using least-squares support vector regression (LSSVR) based functional link artificial neural networks (FLANN)[J]. Measurement Science and Technology, 2008, 19(10): 105202. doi: 10.1088/0957-0233/19/10/105202 [14] 何春茂, 崔中, 苏旭, 等. 基于最小二乘法的机床螺距误差补偿方法研究[J]. 机械管理开发, 2023, 38(1): 4-7. [15] 王伟斌, 邱长泉. 基于最小二乘曲线拟合的信号调理电路误差补偿方法[J]. 计算机测量与控制, 2009, 17(11): 2286-2288,2291. doi: 10.16526/j.cnki.11-4762/tp.2009.11.060 [16] 宋成, 王飞雪, 庄钊文. 基于遗忘因子最小二乘的GPS接收机钟差预测算法研究[J]. 测绘科学, 2008, 33(S1): 41-43,59. [17] 王虎, 王解先, 白贵霞, 等. 改进的渐消卡尔曼滤波在GPS动态定位中的应用[J]. 同济大学学报(自然科学版), 2011, 39(1): 124-128. doi: 10.3969/j.issn.0253-374x.2011.01.024 [18] 张兰勇, 陈辉煌, 孟坤. 消除模型误差的卡尔曼滤波在GPS定位中的应用研究[J]. 兵器装备工程学报, 2018, 39(1): 136-140. doi: 10.11809/bqzbgcxb2018.01.030 [19] 陈柯勋, 邱伟. 一种基于改进卡尔曼滤波的GPS/BDS/SINS深组合定位算法[J]. 太原理工大学学报, 2020, 51(3): 446-450. doi: 10.16355/j.cnki.issn1007-9432tyut.2020.03.018 [20] 高为广, 杨元喜, 张婷. 神经网络辅助的GPS/INS组合导航自适应滤波算法[J]. 测绘学报, 2007(1): 26-30. doi: 10.3321/j.issn:1001-1595.2007.01.005 [21] 林健, 汪木兰, 李宏胜. 基于遗传神经网络的直线伺服系统定位误差补偿[J]. 组合机床与自动化加工技术, 2011(2): 86-88,92. doi: 10.3969/j.issn.1001-2265.2011.02.024 [22] 胡燕祝, 李雷远. Kalman滤波-BP神经网络在执行机构自主定位中的应用[J]. 北京邮电大学学报, 2016, 39(6): 110-115. doi: 10.13190/j.jbupt.2016.06.021 [23] 赵光辉. 道路运输车辆卫星定位系统设计与研究[D]. 西安: 长安大学, 2013. [24] 李俊杰. GNSS和INS导航系统中关键技术的算法研究[D]. 成都: 电子科技大学, 2016. [25] 吴盘龙, 彭帅, 姬存慧. 基于北斗信号辐射源的无源雷达定位技术[J]. 中国惯性技术学报, 2012, 20(3): 306-310. doi: 10.3969/j.issn.1005-6734.2012.03.012 [26] 薛鸿印, 李景森. 北斗无源定位技术[J]. 现代防御技术, 2005(4): 39-41,53. doi: 10.3969/j.issn.1009-086X.2005.04.009 [27] 廉保旺, 赵楠, 王永生. 三星定位算法的研究[J]. 弹箭与制导学报, 2006, 26(1): 134-136,139. doi: 10.3969/j.issn.1673-9728.2006.01.045 [28] 付代光, 肖国强, 周黎明, 等. 基于非线性贝叶斯理论和BIC准则的防渗墙高精度瑞雷波反演研究[J]. 水利水电技术, 2018, 49(8): 64-70. doi: 10.13928/j.cnki.wrahe.2018.08.008 [29] 梁旺, 秦兆博, 陈亮, 等. 基于改进BP神经网络的智能车纵向控制方法[J]. 汽车工程, 2022, 44(8): 1162-1172. doi: 10.19562/j.chinasae.qcgc.2022.08.006 [30] 祁升龙, 芦翔, 刘海涛, 等. 基于遗传算法优化的BP神经网络在配电网故障诊断中的应用[J]. 电力科学与技术学报, 2023, 38(3): 182-187,196. doi: 10.19781/j.issn.1673-9140.2023.03.020 [31] 刘小平, 鄂东辰, 高强, 等. 基于BP神经网络的翻车机液压系统故障诊断[J]. 液压与气动, 2016, 300(8): 68-73. doi: 10.11832/j.issn.1000-4858.2016.08.013 [32] 孟晨, 蒋继乐, 郭斌, 等. 基于神经网络的扭矩传感器稳定性分析预测[J]. 计量科学与技术, 2022, 66(5): 8-14,68. [33] 蒋依芹, 李卓然, 李雨霄, 等. 基于人工神经网络的光学图像标准化显示研究[J]. 计量科学与技术, 2021(2): 63-68,72. -


 点击查看大图
点击查看大图
计量
- 文章访问数: 97
- HTML全文浏览量: 41
- PDF下载量: 15
- 被引次数: 0

