 作者投稿
作者投稿 专家审稿
专家审稿 编辑办公
编辑办公

Long Range Localization Method for Underwater Sound Sources Based on Beamforming Technique
-
摘要: 在开阔水域中进行移动声源的发射声源级校准时,声源的位置通常需要使用GPS、超短基线、惯性导航仪等仪器进行测量。校准实验结束后需要进行声源级校准数据和位置测量数据的时间轴校对。声压接收数据和声源位置往往不在同一条船上采集,进行数据处理前需要对两者进行时间轴校对。为了简化校对过程,提出了基于波束形成的水下声源远距精确测量,利用水面反射产生的虚源和真实声源位置间的几何关系对声源位置进行远距离精确测量,并推导了距离计算公式。通过数值仿真对理论的可行性进行了验证,并讨论了线列阵设计对该方法的影响。在湖上试验中进行了进一步验证,并分析了实验声场对定位算法的影响。在200 m范围内,该方法的定位结果同GPS定位结果间的差异小于1%,说明该方法可行。Abstract: For calibrating the emission sound source level of mobile sound sources in open waters, the location of the sound source is usually determined using GPS, ultra-short baseline, or inertial navigation instruments. After calibration experiments, it's essential to calibrate the time axis of both sound source level data and positional measurement data. As sound pressure data and sound source location are often collected on different vessels, a time axis calibration of both sets of data is needed before processing. To simplify this calibration process, a method based on beamforming for precise long-distance measurement of underwater sound sources is proposed. This method uses the geometric relationship between the virtual source created by water surface reflections and the actual sound source position for long-distance precise measurement and derives a formula for distance calculation. The feasibility of the theory was verified through numerical simulations, and the impact of linear array design on this method was discussed. Further validation was conducted during lake tests, analyzing the influence of the experimental sound field on the positioning algorithm. Within 200 meters, the positioning difference between this method and GPS results was less than 1%, demonstrating its feasibility.
-
Key words:
- metrology /
- sound source level calibration /
- open waters /
- passive positioning /
- long-range positioning
-

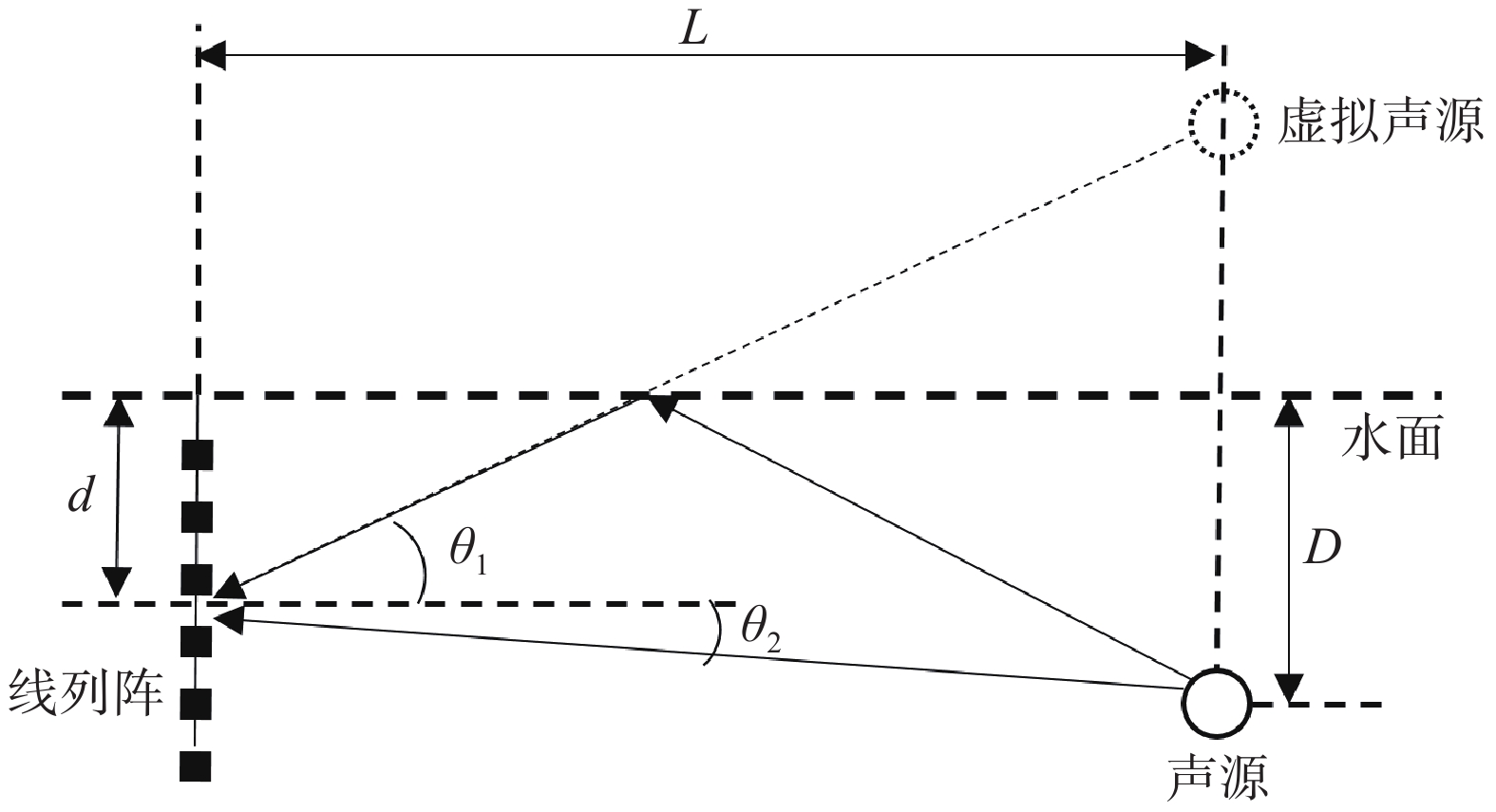
图 1 线列阵、声源及虚拟声源间的相对位置示意图
Figure 1. Schematic diagram of relative positions between the linear array, sound source, and virtual sound source

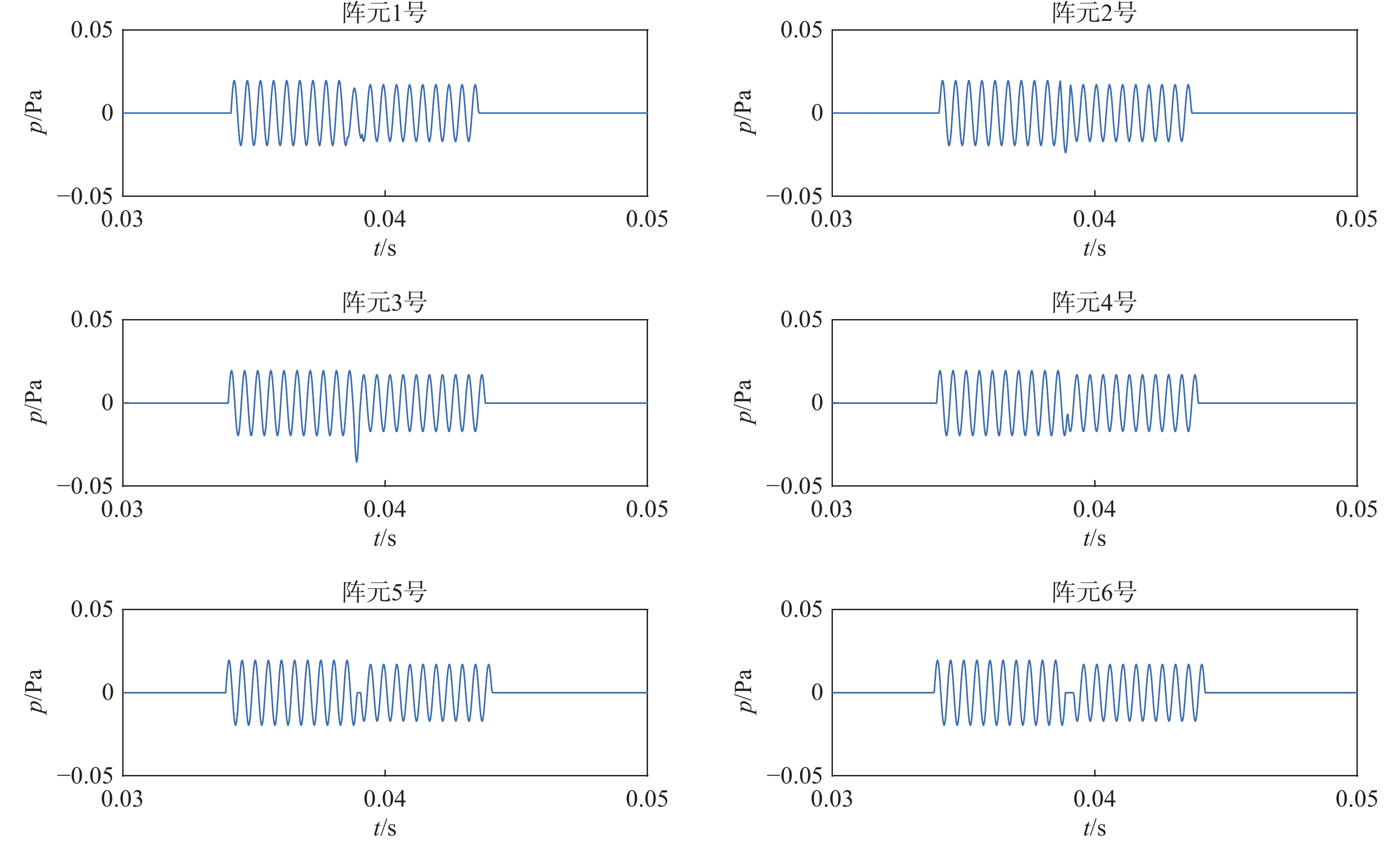
图 4 各阵元接收到的声压信号
Figure 4. Sound pressure signals received by each element of the array

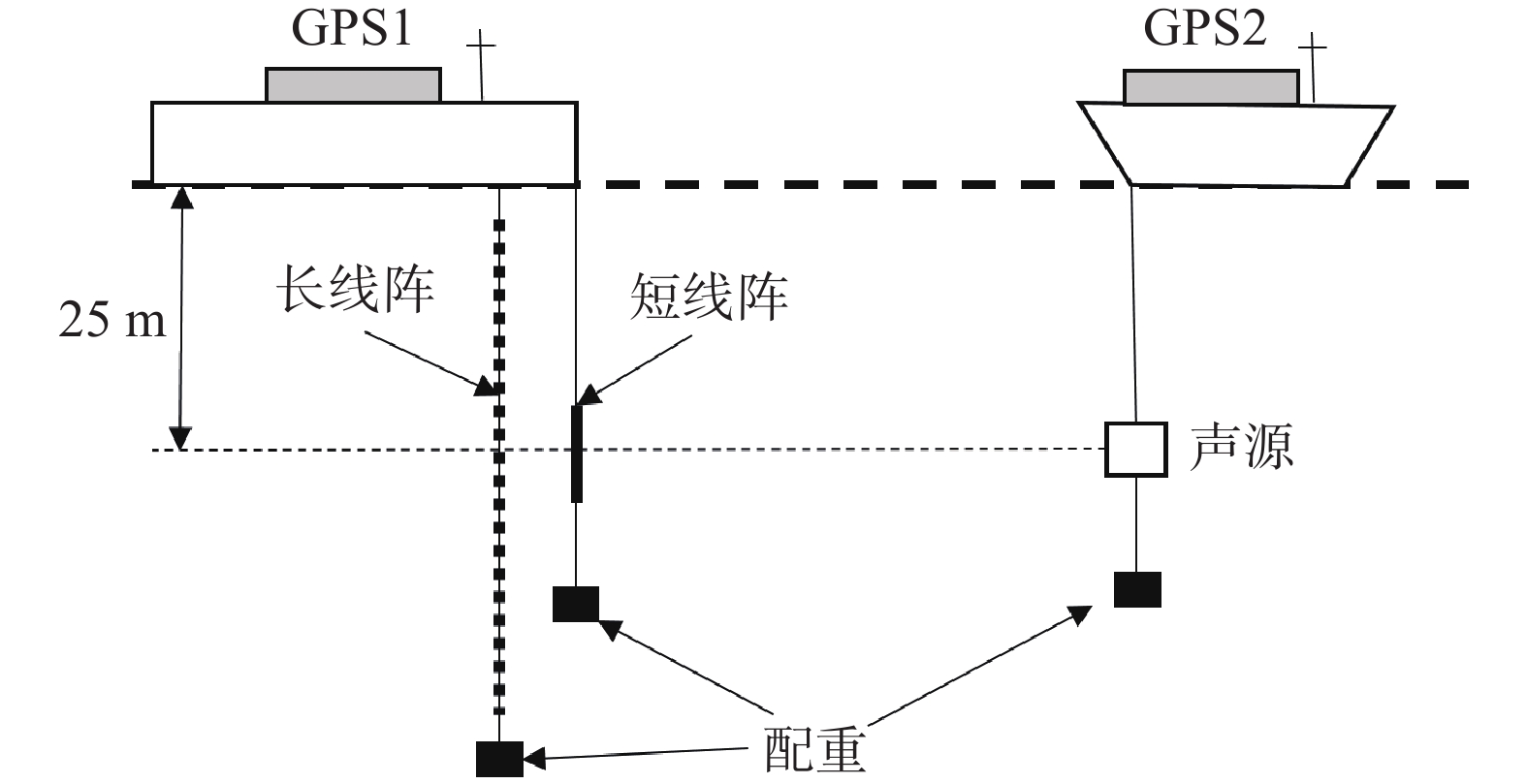
图 6 验证实验的声场布置示意图
Figure 6. Schematic diagram of the sound field arrangement for validation experiments
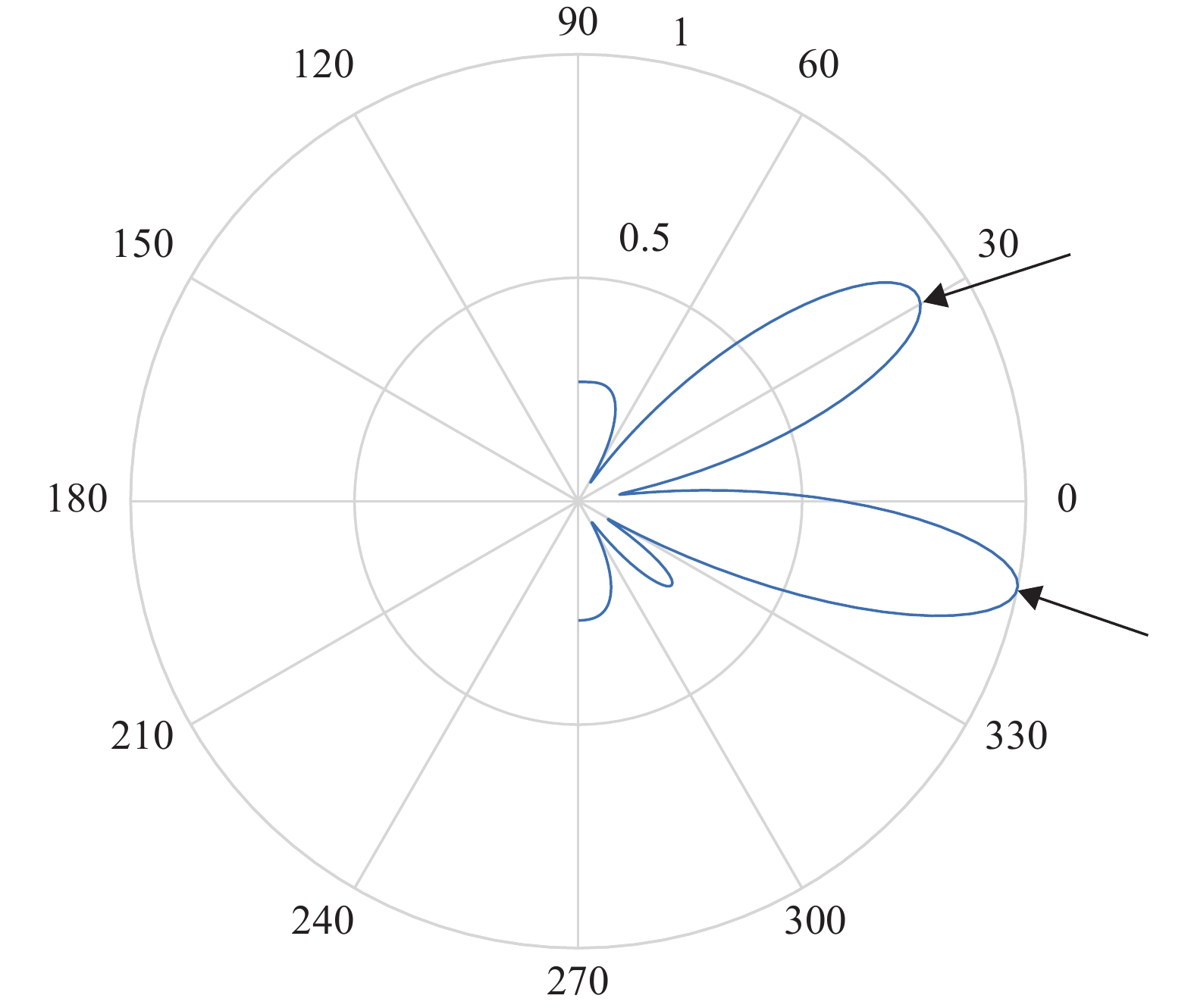
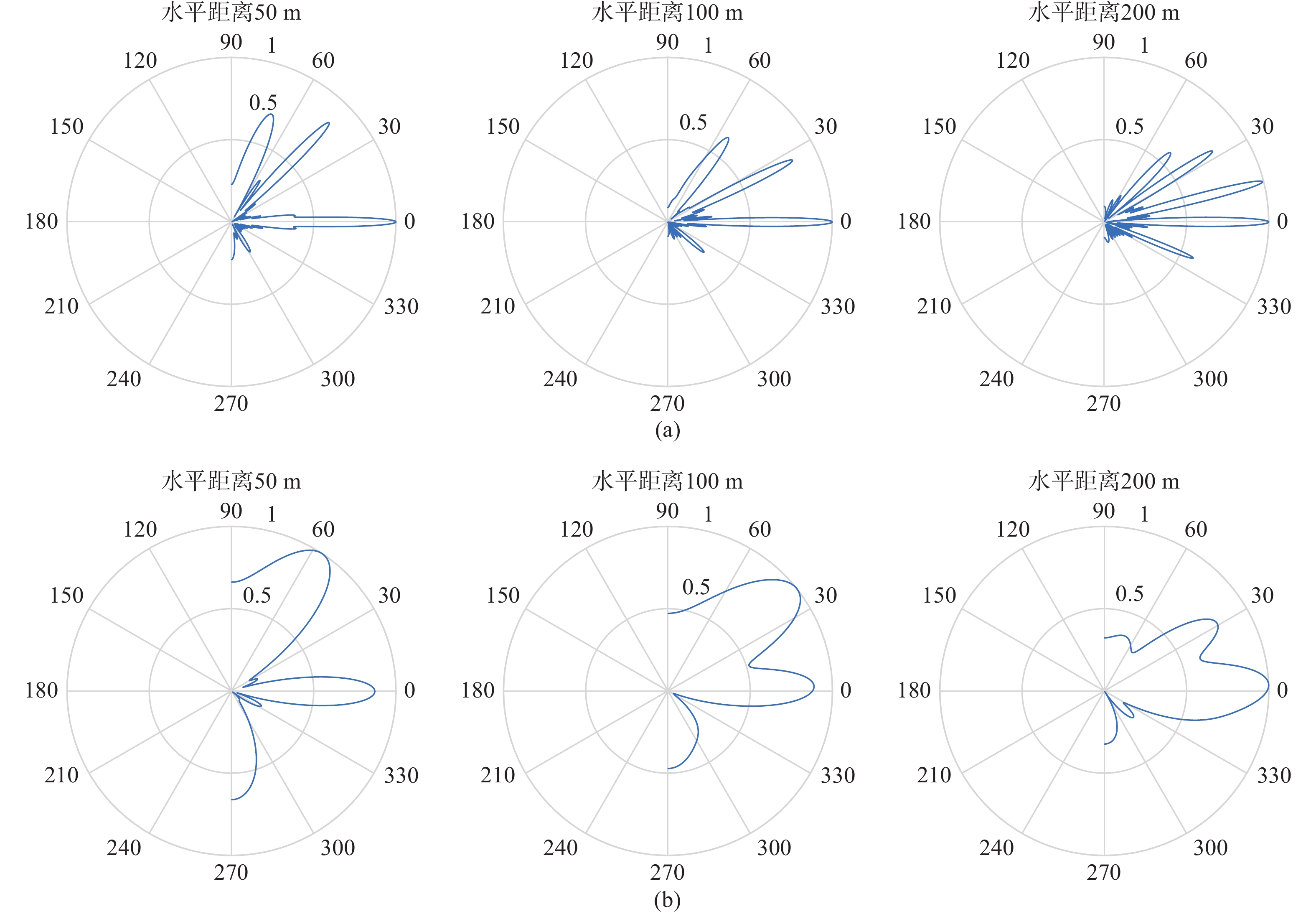
表 1 不同阵元数的波束形成图和相应的定位误差
Table 1. Beamforming patterns with different numbers of array elements and corresponding positioning errors
阵元数 波束形成图 定位误差 6 
6.2 m 12 
1.8 m 18 
0.5 m 24 
0.3 m  下载: 导出CSV
下载: 导出CSV
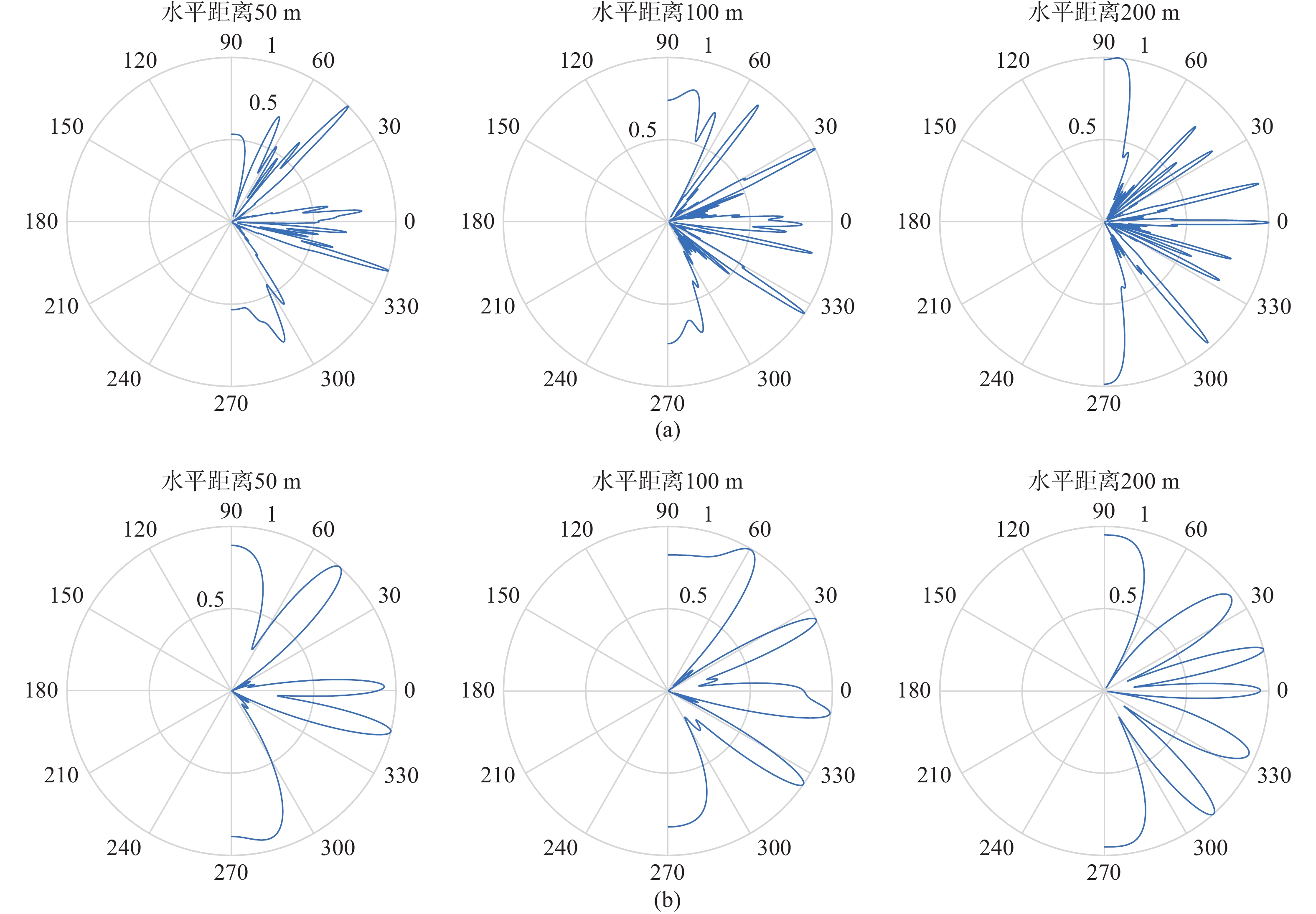
表 2 不同阵元间距与波长之比的波束形成图和相应的定位误差
Table 2. Beamforming maps and corresponding positioning errors for different ratios of array
阵元间距与波长之比 波束形成图 定位误差 1 
无法定位 1/2 
0.1 m 1/4 
0.3 m 1/8 
1.6 m
下载: 导出CSV
表 3 声源定位结果和实测结果差异
Table 3. Differences between the sound source localization results and the actual measurement results
水平距离 阵元数 24 6 52.2 m 0.13 m 5.6 m 103.7 m 0.52 m 12.2 m 212.8 m 1.82 m 92.8 m(失效)
下载: 导出CSV
-
[1] 王世全, 陈毅. 一种高静水压下水声发射换能器声学性能测量方法: CN201710941956.5[P]. [2023-11-19 [2] 张震,鄢社锋,曾迪. 基于卷积神经网络与时频分析的水声通信前导信号检测方法[J]. 舰船科学技术, 2023, 45(22): 138-142. [3] 朱琳. 水声换能器及基阵测量声场设计[C]. 中国声学学会微声学分会. 2016中国西部声学学术交流会论文集, 2016. [4] 张明佑, 陈桂芳. 水声换能器大功率特性测量装置不确定度分析[J]. 声学与电子工程, 1998(4): 5. [5] 尚大晶, 李琪, 唐锐, 等. 一种水声发射换能器宽带发送响应的快速测量方法及装置: CN201811017224.8[P]. [2023-11-19 [6] 吴本玉. 低频换能器水池测试新技术研究[D]. 北京: 中国科学院, 2009. [7] 刘玉财, 陈毅, 易文胜. 浅水域水声换能器发射声源级估计[C]. 四川省声学学会. 2020中国西部声学学术交流会论文集, 2020. [8] 梁民赞, 费志刚. 高精度舰艇声纳测量误差标定方法[J]. 兵器装备工程学报, 2018, 39(7): 4. [9] 李岳明, 李晔, 盛明伟, 等. AUV搭载多波束声纳进行地形测量的现状及展望[J]. 海洋测绘, 2016, 36(4): 7-11. doi: 10.3969/j.issn.1671-3044.2016.04.002 [10] 潘汉, 袁煜, 敬忠良, 等. 基于自主水下机器人惯导与超短基线定位传感器的轨迹解算与配准方法: CN202210548232.5[P]. [2023-11-19 [11] 盛勇杰, 王月兵, 佟昊阳, 等. 开阔水域下换能器指向性实船校准方法研究[J]. 声学技术, 2021, 40(4): 581-586. doi: 10.16300/j.cnki.1000-3630.2021.04.023 [12] 罗宇, 王晶静, 施剑. 超短基线水声定位系统误差校准方法综述[J]. 产业创新研究, 2022(10): 114-117. [13] 董磊, 商德江, 肖妍, 等. 水声换能器表面声阻抗特性声全息测量方法研究[C]. 第十七届船舶水下噪声学术讨论会, 2023. [14] 王成, 郑慧峰, 王月兵, 等. 基于近场测量法的水声换能器声场重建方法研究[J]. 计量学报, 2016, 37(5): 5. doi: 10.3969/j.issn.1000-1158.2016.05.14 [15] 马超. 空域移变反卷积波束形成方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2021. [16] 王兆彬, 巩朋成, 邓薇, 等. 联合协方差矩阵重构和ADMM的鲁棒波束形成[J]. 哈尔滨工业大学学报, 2023, 55(4): 8. doi: 10.11918/202112044 [17] 余赟, 凌青, 陈阳, 等. 导向向量随机误差修正的稳健波束形成[J]. 声学学报, 2023, 48(2): 7. doi: 10.15949/j.cnki.0371-0025.2023.02.010 [18] 李健, 陈少华. MIMO系统中基于标量指标反馈的线性波束形成和用户调度[J]. 电子器件, 2023, 46(4): 943-950. [19] 范崇祎, 葛少迪, 王建, 等. 利用稀疏贝叶斯推理估计干扰导向矢量和功率的稳健自适应波束形成方法[J]. 信号处理, 2023, 39(2): 278. doi: 10.16798/j.issn.1003-0530.2023.02.009 [20] 陈阳, 田波, 王春阳, 等. 基于MVDR波束形成的FDA平台外干扰抑制[J]. 系统工程与电子技术, 2023, 45(1): 32-40. [21] 沈季, 万显荣, 易建新, 等. 复杂干扰场景下的稳健自适应波束形成[J]. 系统工程与电子技术, 2023, 45(4): 941-949. doi: 10.12305/j.issn.1001-506X.2023.04.01 [22] 吕岩, 曹菲, 许剑锋, 等. 基于FRFT的单基地MIMO雷达稳健波束形成算法[J]. 系统工程与电子技术, 2023, 45(1): 79-85. [23] 陈鹏, 景晓簪, 陈洋, 等. 稳健的特征空间基变换自适应波束形成[J]. 哈尔滨工业大学学报, 2023, 55(5): 71-77. doi: 10.11918/202112102 [24] 刘政伟, 崔琳, 张熠鑫. 改进狮群优化算法的鲁棒波束形成[J]. 计算机工程与设计, 2023, 44(3): 770-776. doi: 10.16208/j.issn1000-7024.2023.03.018 [25] 胡斌, 沈学勇, 蒋敏. 误差条件下基于协方差矩阵重构的自适应波束形成[J]. 电子与信息学报, 2023, 45(8): 2986-2990. doi: 10.11999/JEIT220918 [26] 吕岩, 曹菲. 基于线性约束最小方差的稳健波束形成算法[J]. 北京航空航天大学学报, 2023, 49(3): 8. doi: 10.13700/j.bh.1001-5965.2021.0280 [27] 李鑫宇, 王鹏毅, 夏双志, 等. 一种广域稀布雷达低旁瓣波束形成方法[J]. 计算机测量与控制, 2023, 31(5): 271-277. doi: 10.16526/j.cnki.11-4762/tp.2023.05.041 [28] 唐佳雨, 杨竞舟, 胡登辉, 等. 一种联合修正的稳健Capon波束形成算法[J]. 无线电通信技术, 2023, 49(5): 971-978. doi: 10.3969/j.issn.1003-3114.2023.05.024 [29] 王敏, 杨平, 何龙标, 等. 激光干涉技术在水声测量中的应用与发展[J]. 计量科学与技术, 2022, 66(4): 2-12. [30] 郑云山, 牛锋, 钟波. 平方反比规律校准消声室和数据处理[J]. 计量科学与技术, 2022, 66(7): 54-57. -


 点击查看大图
点击查看大图
计量
- 文章访问数: 115
- HTML全文浏览量: 42
- PDF下载量: 21
- 被引次数: 0

