 作者投稿
作者投稿 专家审稿
专家审稿 编辑办公
编辑办公

Development of a Deep Learning-Based Self-Calibrating Radar Speed Measurement System
-
摘要: 雷达测速仪作为主要的测速设备,在车速测量方面扮演着至关重要的角色。然而,雷达测速仪在实际应用中仍存在一定局限性,特别是长时间保持测速数值的准确性是一大挑战。研究一种基于卷积神经网络的自校准雷达测速系统,保证雷达测速仪的数据准确可靠。提出了一种低成本的神经网络测速系统,使用数字图像处理技术、YOLO v7目标检测神经网络,实现目标车辆的提取;另外,设计了一种速度计算卷积神经网络,制作数据集训练该神经网络,并通过数据消融实验确定了神经网络的参数。进行实验验证,结果表明该系统能够准确可靠地测量车速,并且具有较高的精度和稳定性。该速度计算卷积神经网络可以有效地识别出雷达是否存在误差,以及过滤掉雷达收集到的异常数值。并且,借助该功能可以实现雷达的自动校准功能,从而保持测速设备的长期准确,提高测速工作的可靠性和可持续性。
-
关键词:
- 计量学 /
- 雷达测速 /
- CNN卷积神经网络 /
- YOLO v7目标检测神经网络 /
- 数字图像处理
Abstract: Radar speedometers, crucial in vehicular speed measurement, encounter challenges in maintaining accuracy over extended periods. This study introduces a self-calibrating radar speed measurement system employing a convolutional neural network (CNN) to enhance data accuracy and reliability. We present an economical neural network-based speed measurement system that utilizes digital image processing and YOLO v7 object detection neural network for target vehicle extraction. Additionally, a dedicated CNN for speed calculation is designed and trained using a custom dataset. The network's parameters are optimized through data ablation experiments. Experimental validation confirms the system's capability to measure vehicle speed with high accuracy and stability. The developed CNN for speed calculation effectively identifies potential radar errors and excludes anomalous data, thus facilitating the radar's automatic calibration. This feature ensures long-term precision of the speed measurement equipment, significantly improving the reliability and sustainability of speed measurement operations. -

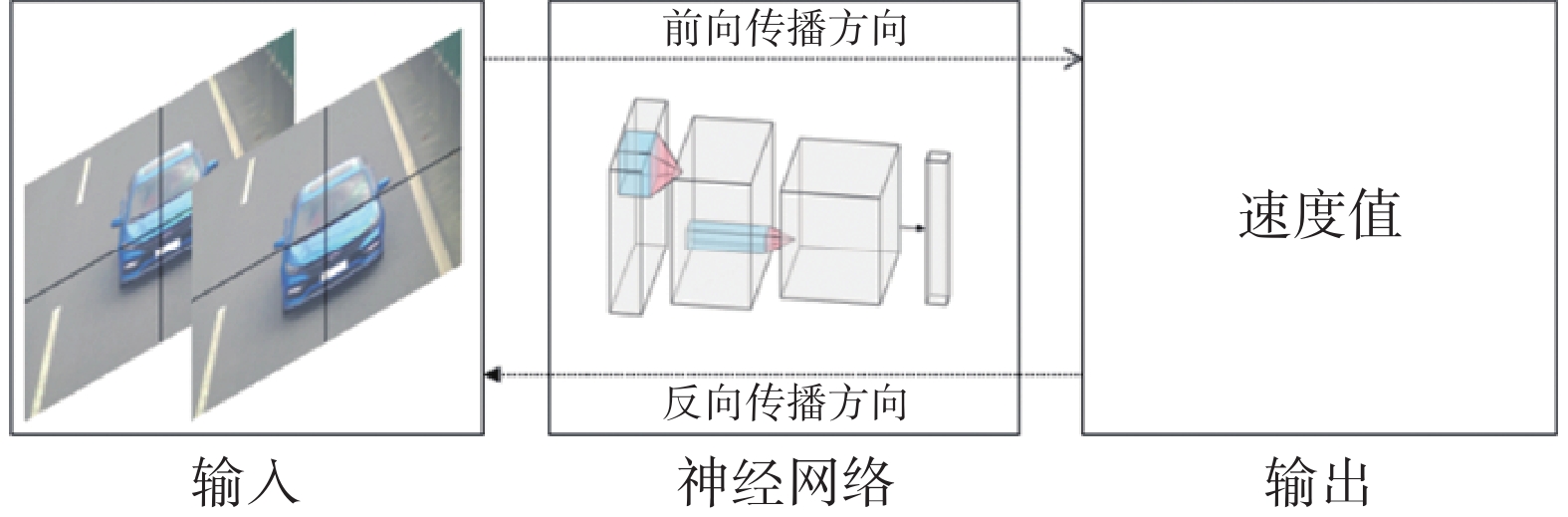
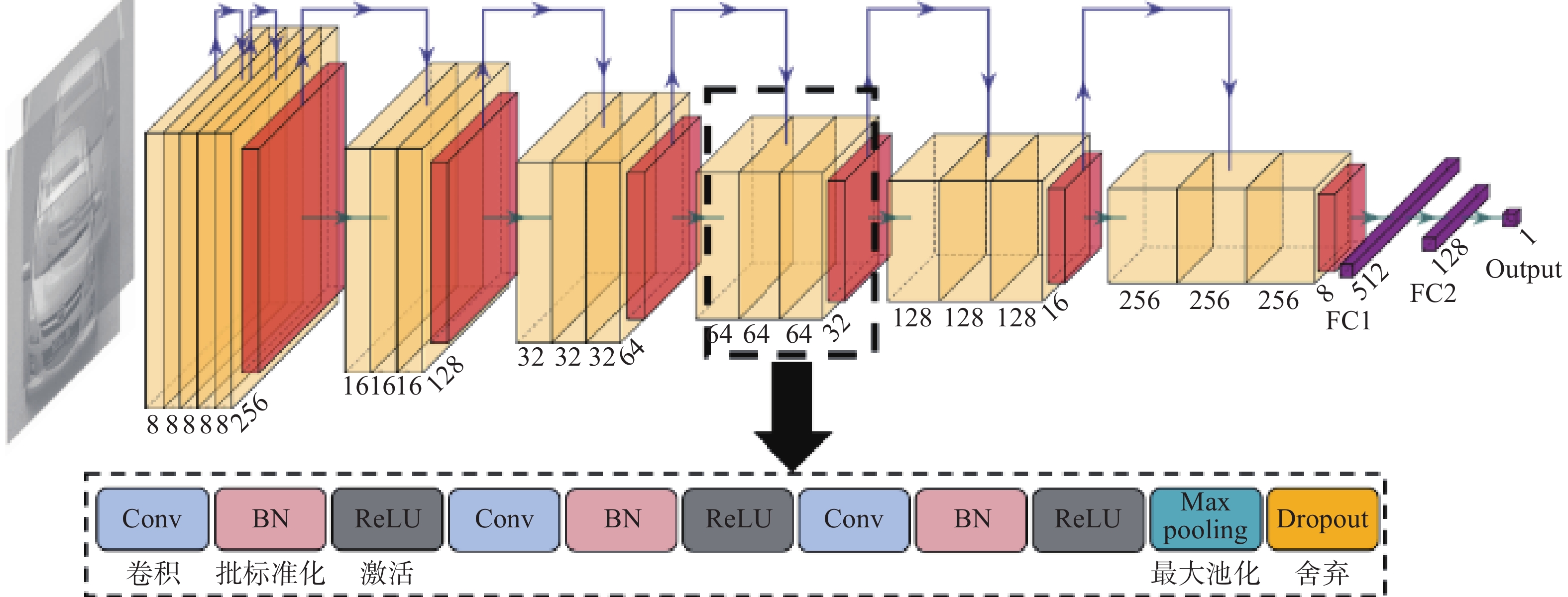
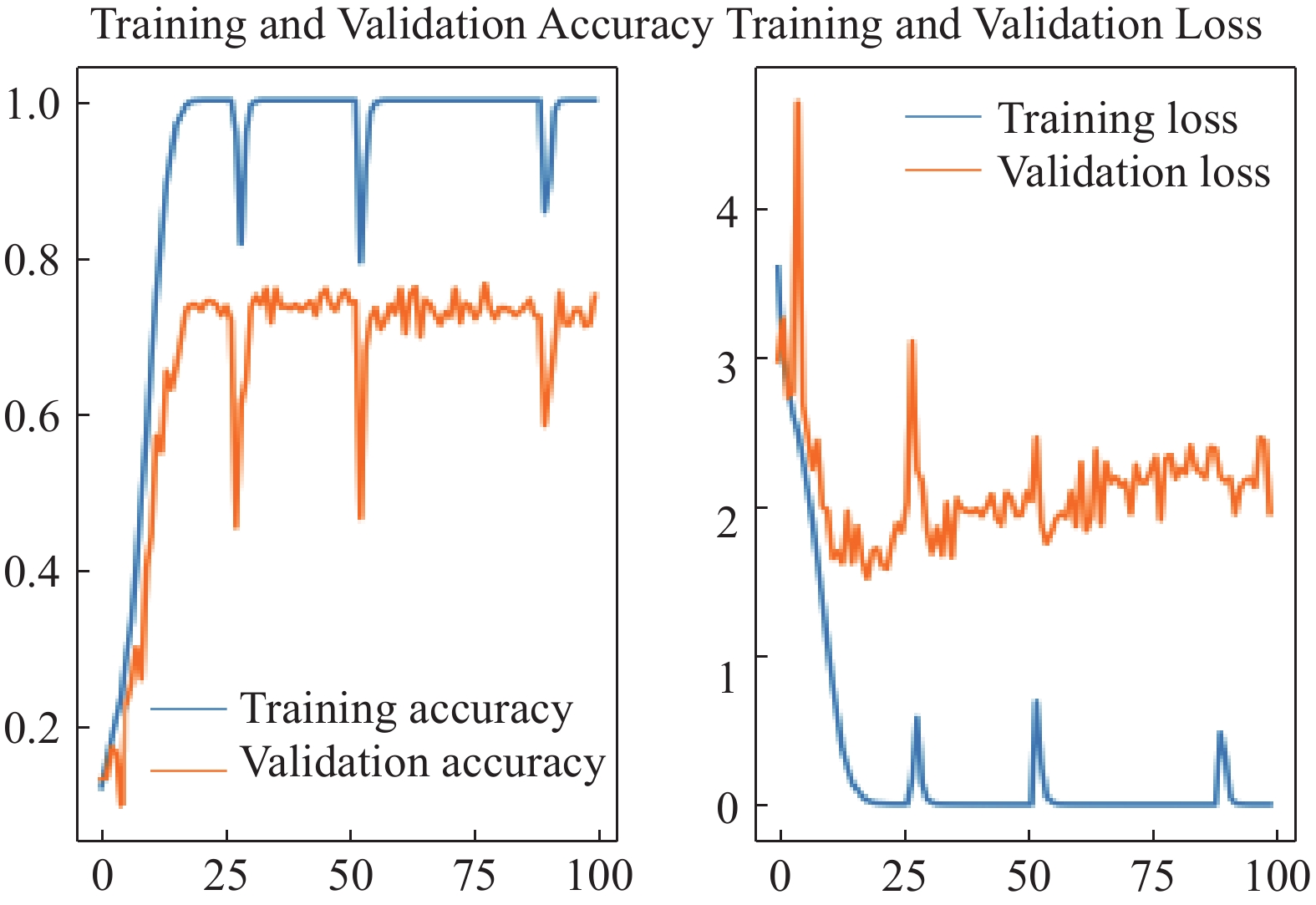
图 4 基于卷积神经网络的车速测量模型训练过程
Figure 4. Training process of the vehicle speed measurement model based on convolutional neural network

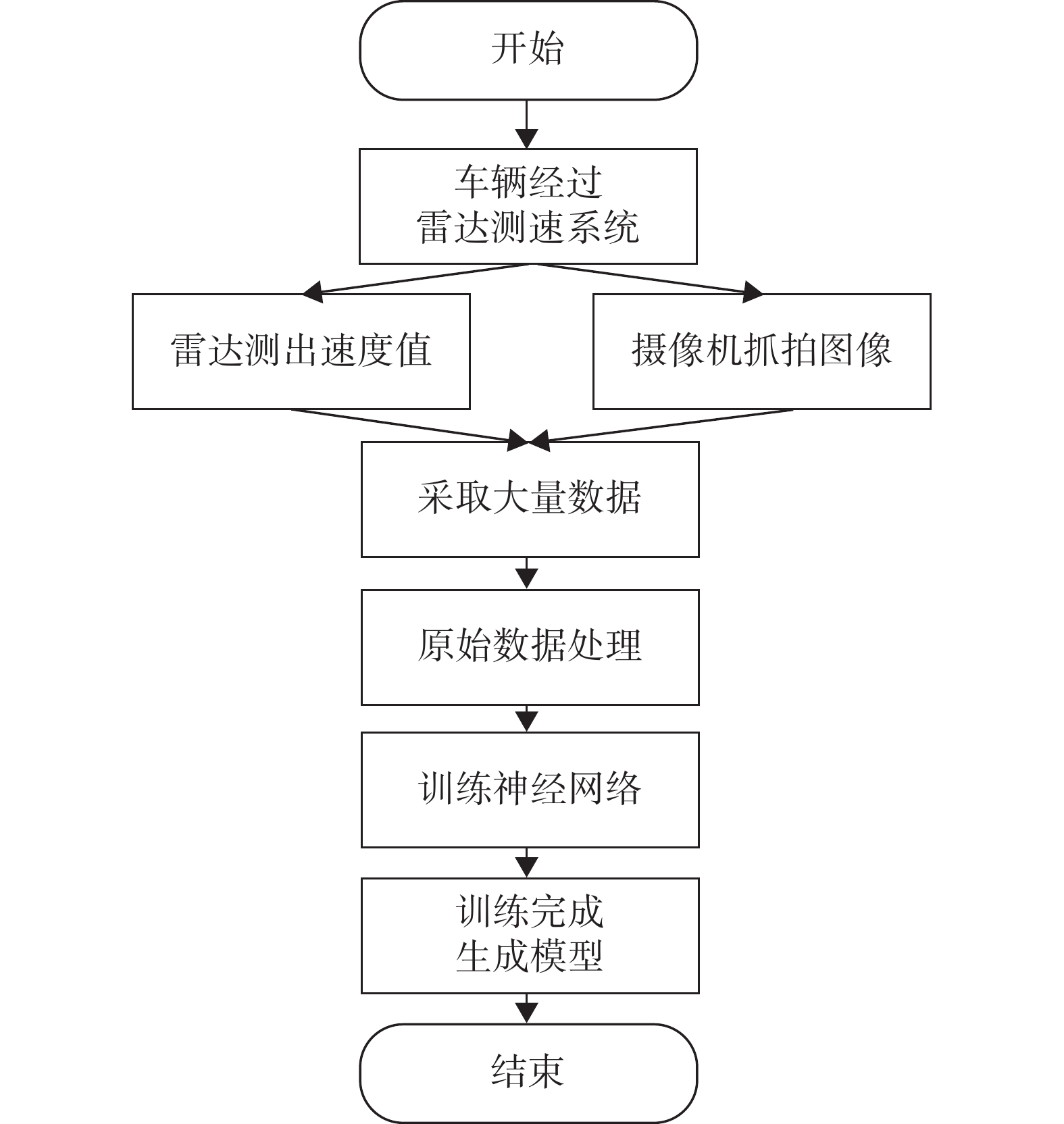
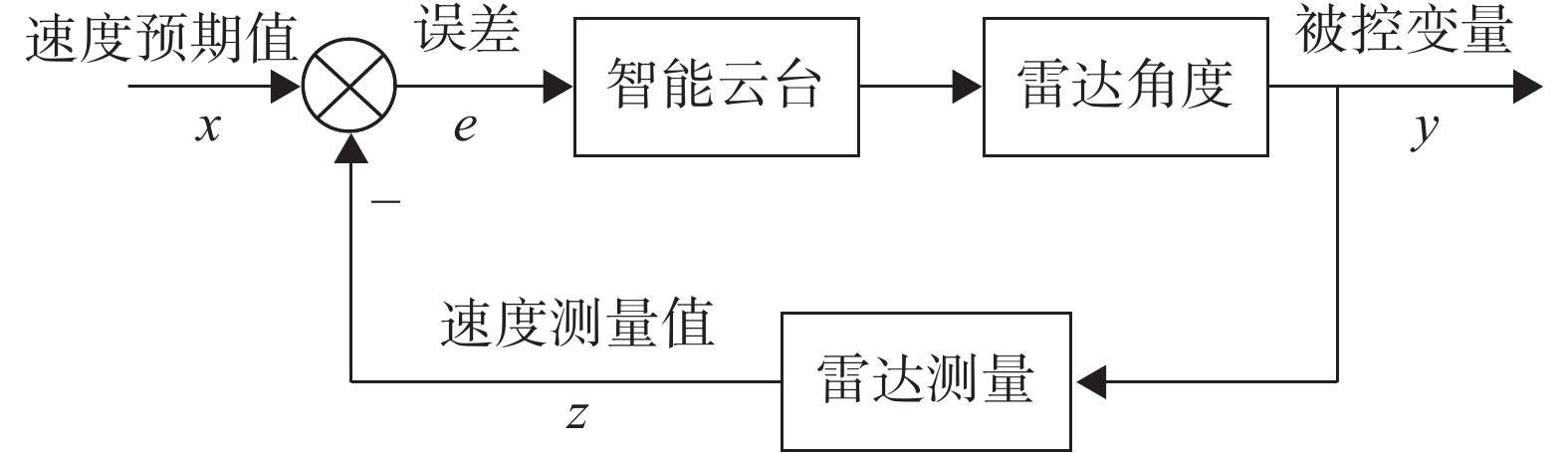
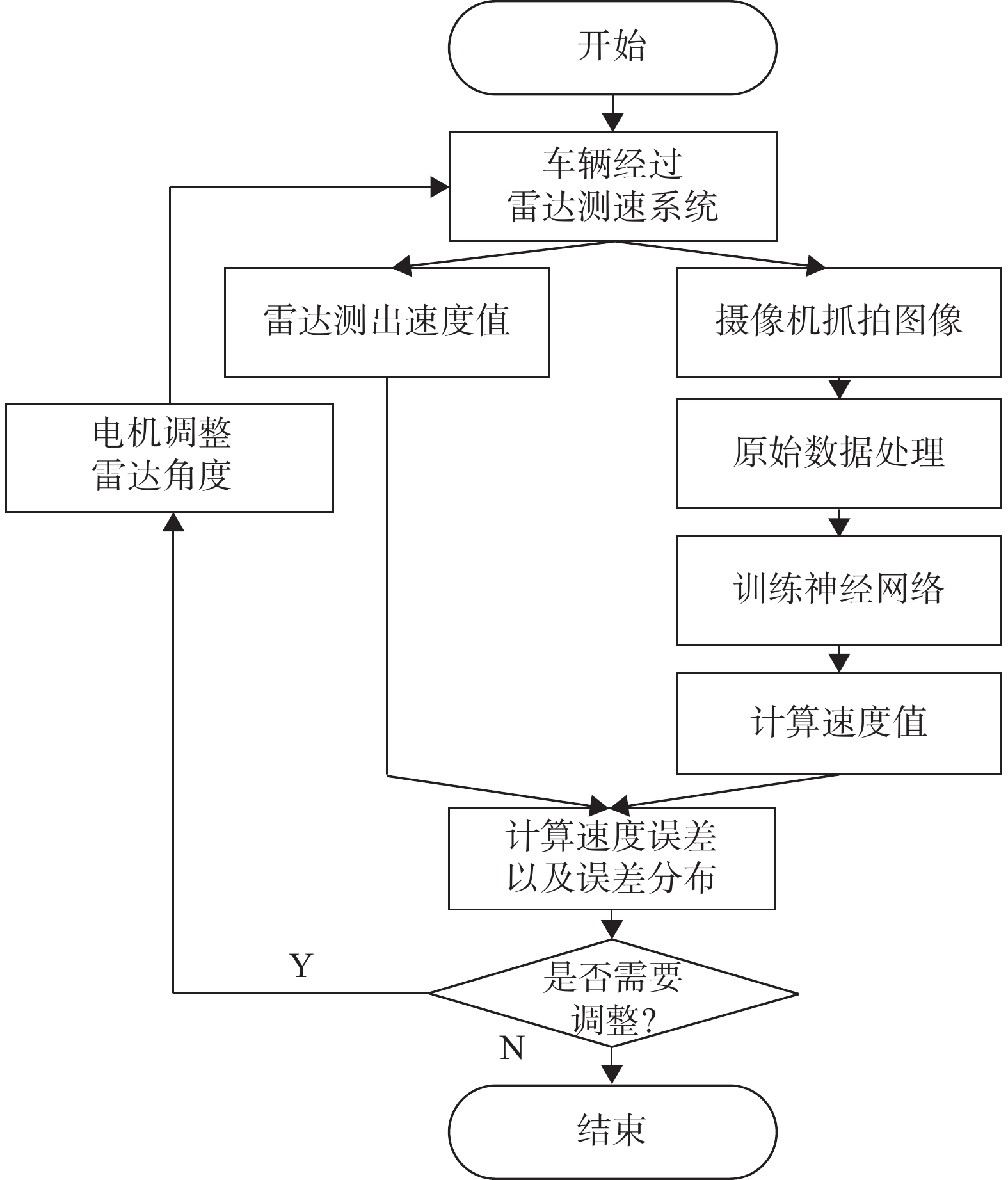
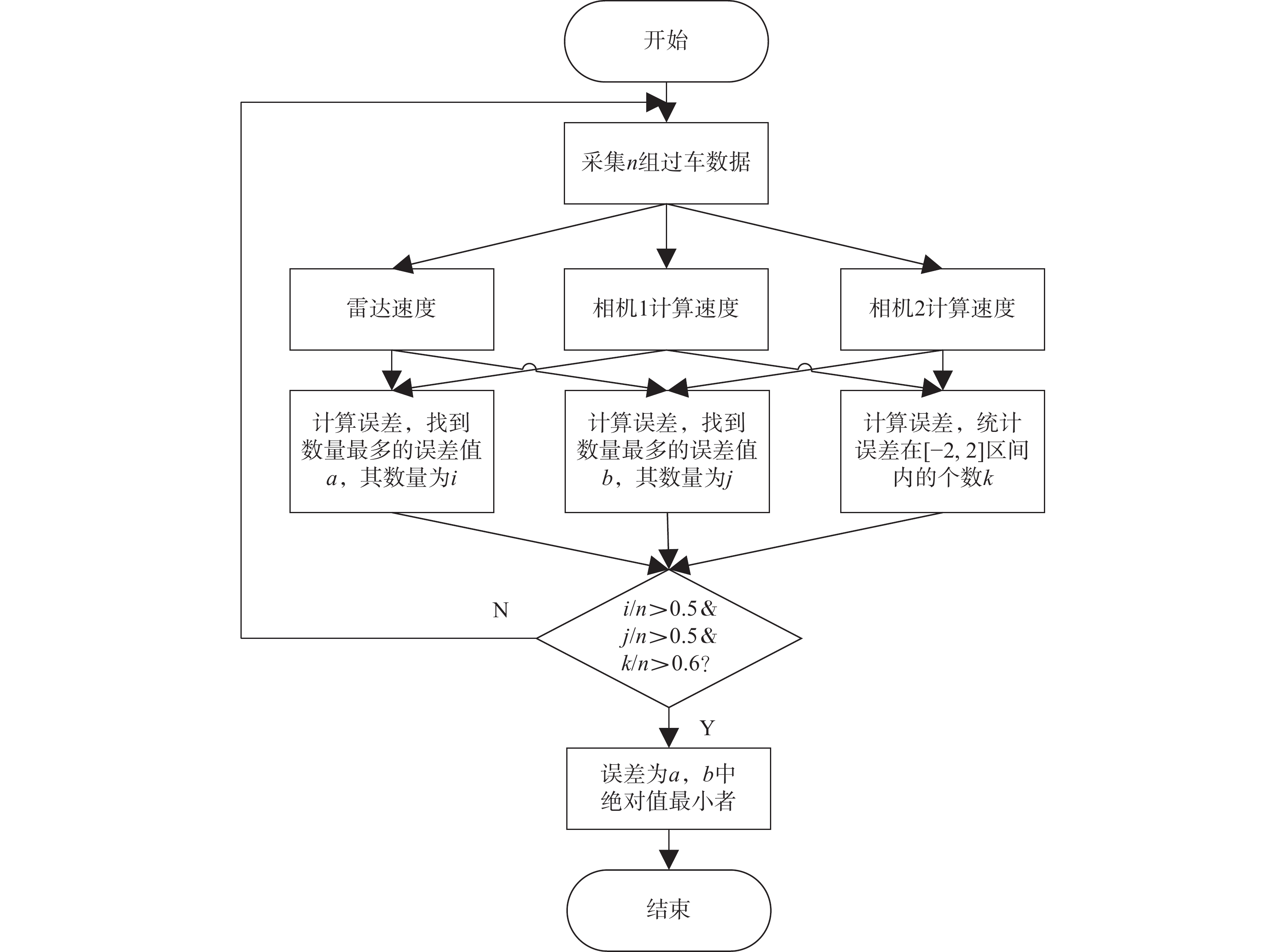
图 6 雷达自校准测速系统流程图
Figure 6. Flowchart of the radar self-calibration speed measurement system
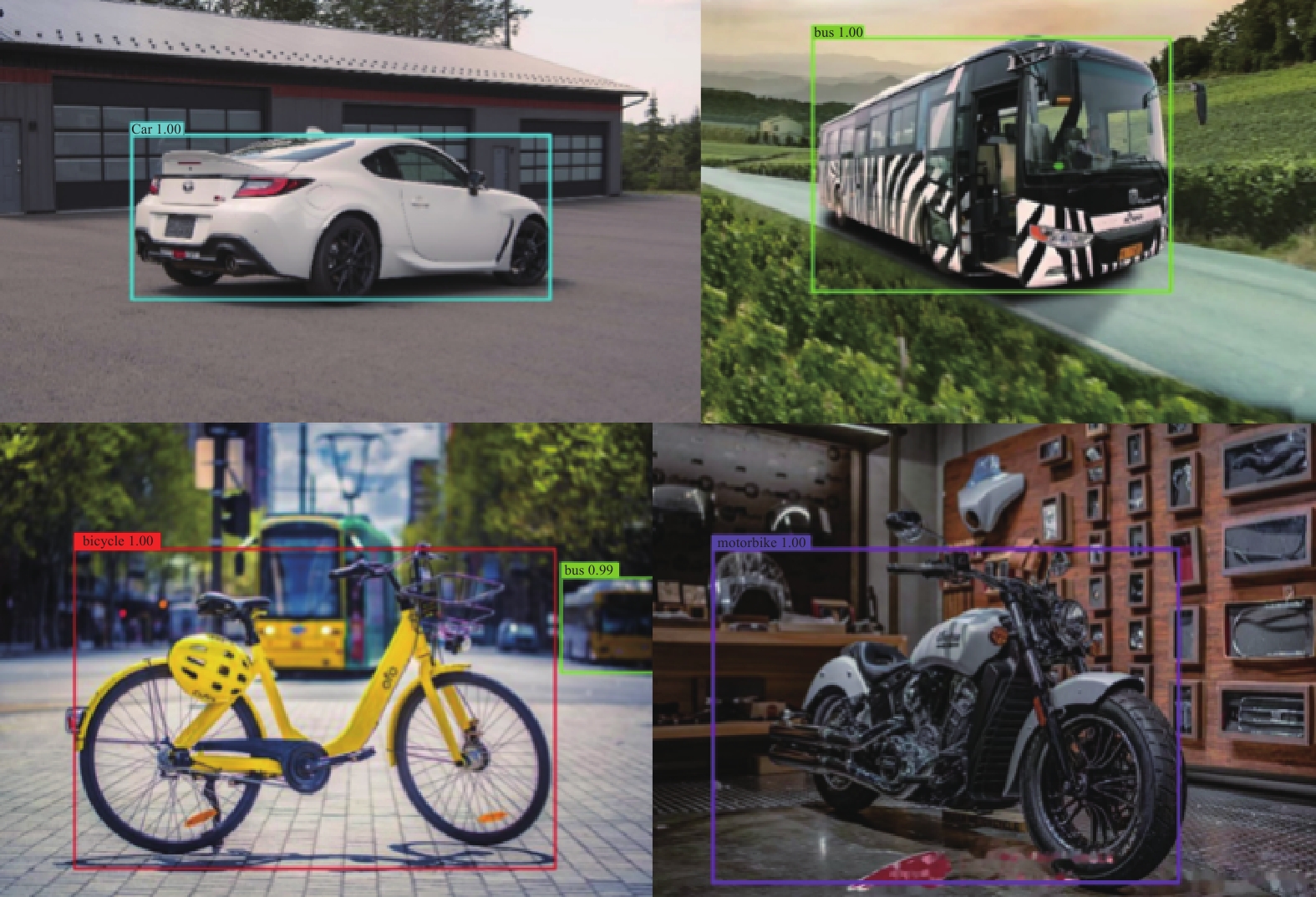
表 1 各目标mAP
Table 1. mAP for each target
object ap F1 Recall Precision bicycle 75.81% 0.78 67.80% 90.91% bus 84.69% 0.84 77.88% 91.01% car 83.37% 0.80 72.64% 89.29% motorbike 84.37% 0.77 73.87% 81.19% 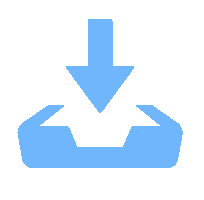 下载: 导出CSV
下载: 导出CSV
表 2 实车实验对比
Table 2. Comparison of actual vehicle experiments (km/h)
速度真值 雷达速度 计算速度 与雷达误差 53.7 51 50 −1 68.2 67 67 0 74.3 72 72 0 81.3 79 77 −2 85.5 84 84 0 86.7 85 85 0 90.3 88 87 −1 94.2 92 92 0 96 94 94 0 100.7 98 95 −3 101.4 99 99 0 107.2 105 105 0 115.8 112 112 0 120.5 117 118 1
下载: 导出CSV
表 3 修正前数据
Table 3. Data before correction
(km/h) 雷达速度 计算速度 误差 81 84 −3 82 86 −4 90 94 −4 94 97 −3 84 87 −3 87 90 −3 91 92 −1 90 92 −2 87 90 −3 84 87 −3
下载: 导出CSV
表 4 修正后数据
Table 4. Revised data
(km/h) 雷达速度 计算速度 误差 85 84 1 84 84 0 92 92 0 97 98 −1 96 96 0 83 81 2 80 78 2 91 91 0 99 99 0 100 100 0
下载: 导出CSV
-
[1] 陆跃亚. 试论治理超速行驶违法行为的必要性及对策[J]. 法制与社会, 2010(9): 85. [2] 王长君, 黄雁, 高岩. 超速行驶违法行为的分析和对策[J]. 交通运输工程与信息学报, 2005(3): 10-15. [3] 国家质量监督检验检疫总局. 固定式机动车雷达测速仪: JJG 527-2015[S]. 北京: 中国标准出版社, 2015. [4] 孙桥, 杜磊, 白杰, 等. 全国非接触式汽车速度计比对的研究[J]. 计量学报, 2020, 41(11): 1386-1390. [5] 张跃, 蔡常青, 孙桥. 机动车测速仪现场测试技术的国内外现状[J]. 中国计量, 2007(4): 69-70. doi: 10.3969/j.issn.1006-9364.2007.04.039 [6] 白银, 孙桥, 杜磊, 等. 移动式机动车现场标准测速仪溯源技术的研究[J]. 计量学报, 2015, 36(1): 72-76. [7] 金玮, 孟晓曼, 武益超. 深度学习在图像分类中的应用综述[J]. 现代信息科技, 2022, 6(16): 29-31,35. doi: 10.19850/j.cnki.2096-4706.2022.16.008 [8] 李柯泉, 陈燕, 刘佳晨, 等. 基于深度学习的目标检测算法综述[J]. 计算机工程, 2022, 48(7): 1-12. [9] 黄雯珂, 滕飞, 王子丹, 等. 基于深度学习的图像分割综述[J/OL]. [2023-12-14]. http://kns.cnki.net/kcms/detail/50.1075.TP.20231118.1805.004.html. [10] 王家, 龙冬梅. 深度学习在语音识别中的应用综述[J]. 电脑知识与技术, 2020, 16(34): 191-192,197. [11] 张小峰, 谢钧, 罗健欣, 等. 深度学习语音合成技术综述[J]. 计算机工程与应用, 2021, 57(9): 50-59. [12] 张宇. 基于深度学习的机器翻译方法研究综述[J]. 信息与电脑(理论版), 2023, 35(10): 40-42. [13] 于海涛, 刘竞泽, 刘乐. 深度学习在情感分析领域的应用综述[J]. 现代信息科技, 2023, 7(17): 50-54,60. doi: 10.19850/j.cnki.2096-4706.2023.17.010 [14] 汪家伟, 余晓. 基于深度学习的文本分类研究综述[J/OL]. [2023-12-15]. https://doi.org/10.16180/j.cnki.issn1007-7820.2024.01.012. [15] OpenAl. lntroducing ChatGPT[Z]. [2023-06-27 [16] Devlin J , Chang M W , Lee K , et al. BERT: Pre-training of Deep Bidirectional Transformers for Language Understanding[J]. ArXiv, 2018, 5: 1. [17] 倪浩, 沈维多. 对标ChatGPT, 百度将上线“文心一言”[Z]. [2023-02-08 [18] Wang C Y , Bochkovskiy A , Liao H Y M . YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[C]. ArXiv, 2022. [19] 张强, 李嘉锋, 卓力. 车辆识别技术综述[J]. 北京工业大学学报, 2018, 44(3): 382-392. [20] Jiuxiang Gu, Zhenhua Wang, Jason Kuen, et al. Recent advances in convolutional neural networks[J]. Pattern Recognition, 2018, 77: 354-377. doi: 10.1016/j.patcog.2017.10.013 [21] Srivastava N, Hinton G, Krizhevsky A, et al. Dropout: A Simple Way to Prevent Neural Networks from Overfitting[J]. Journal of Machine Learning Research, 2014, 15(1): 1929-1958. [22] ÇaglarGülçehre, MarcinMoczulski, MishaDenil, et al. Noisy Activation Functions. [C]. ICML : 33rd International Conference on Machine Learning, 2016. [23] Ioffe S, Szegedy C. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift[C]. ICML : 32nd International Conference on Machine Learning, 2015. [24] 周俊宇, 赵艳明. 卷积神经网络在图像分类和目标检测应用综述[J]. 计算机工程与应用, 2017, 53(13): 34-41. [25] 贾世杰, 杨东坡, 刘金环. 基于卷积神经网络的商品图像精细分类[J]. 山东科技大学学报(自然科学版), 2014, 33(6): 91-96. [26] 常亮, 邓小明, 周明全, 等. 图像理解中的卷积神经网络[J]. 自动化学报, 2016, 42(9): 1300-1312. [27] 卢宏涛, 张秦川. 深度卷积神经网络在计算机视觉中的应用研究综述[J]. 数据采集与处理, 2016, 31(1): 1-17. [28] Lin M , Chen Q , Yan S . Network In Network[J]. [2023-12-15]. DOI: 10.48550/arXiv.1312.4400. [29] 张珂, 冯晓晗, 郭玉荣, 等. 图像分类的深度卷积神经网络模型综述[J]. 中国图象图形学报, 2021, 26(10): 2305-2325. [30] 季长清, 高志勇, 秦静, 等. 基于卷积神经网络的图像分类算法综述[J]. 计算机应用, 2022, 42(4): 1044-1049. [31] 周思达, 邱爽, 唐嘉宁, 等. 基于深度神经网络的无人机路径决策的研究[J]. 计算机仿真, 2022, 39(6): 449-452. -








 点击查看大图
点击查看大图

计量
- 文章访问数: 81
- HTML全文浏览量: 41
- PDF下载量: 14
- 被引次数: 0

