 作者投稿
作者投稿 专家审稿
专家审稿 编辑办公
编辑办公

A Review of Dynamic Force Decoupling and Calibration Techniques
-
摘要: 随时间变化的力称作为动态力,其在航空航天、材料科学、汽车制造、武器威力等研究领域均为重要的测量参数。理想情况下,动态力测试与其他传感器输出无关,涉及的仅仅是测试通道方向的输出。但是,由于加工工艺、安装工艺等限制,在测量某方向动态力时,难免耦合其他方向的输出信号造成动态耦合,只有准确的找到各维间力的相互耦合关系,才可以达到精确测量动态力的目的。同时,在测试前应先标定传感器,以提高测量的准确性。目前多采用静态标定进行动态力测量的“静标使用”方法,在测量中必然会产生较大的误差。因此,动态力的解耦及动态标定具有较大的意义。通过分析相关文献,总结了动态力解耦和动态力标定的常用方法,对比优缺点并提出展望。Abstract: Dynamic force, a key measurement parameter in fields such as aerospace, material science, automobile manufacturing, and weapon efficacy, refers to force that varies over time. Ideally, dynamic force measurements should be unaffected by other sensor outputs, focusing solely on the test channel's directional output. Nevertheless, limitations in processing and installation technologies often result in inadvertent coupling of signals from other directions, leading to dynamic coupling. Accurate dynamic force measurements hinge on identifying the interdimensional coupling relationships among forces. Additionally, sensor calibration prior to testing is essential for enhancing measurement accuracy. Currently, the prevalent practice of using static calibration for dynamic force measurement often results in significant errors. Hence, the study and application of dynamic force decoupling and calibration methods are of paramount importance. This paper synthesizes various literature, summarizing common methods of dynamic force decoupling and calibration, comparing their strengths and weaknesses, and providing future perspectives.
-
Key words:
- metrology /
- dynamic force measurement /
- dynamic calibration /
- dynamic force decoupling /
- sensor
-

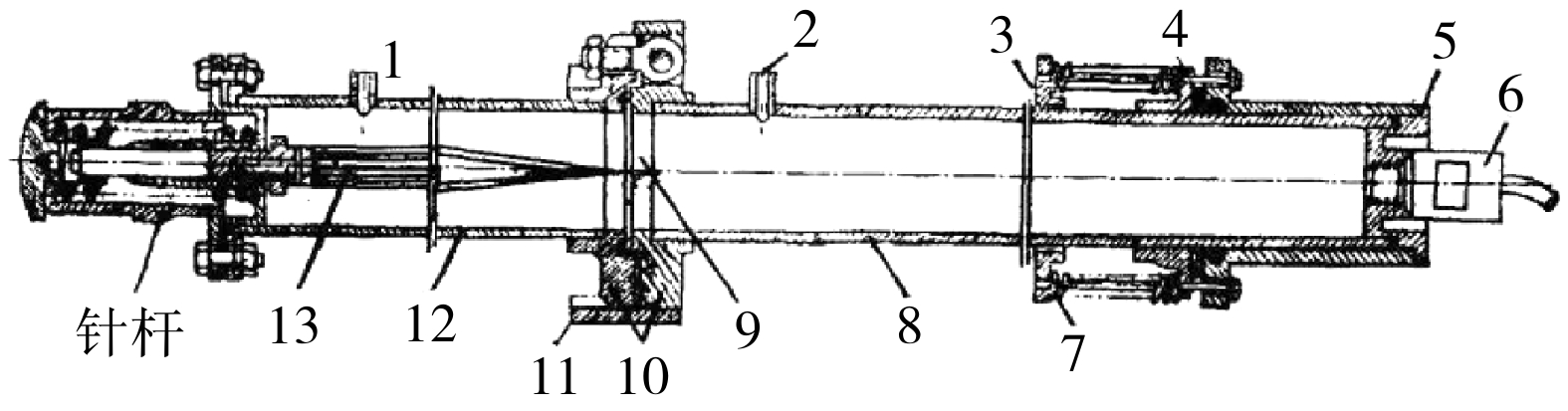
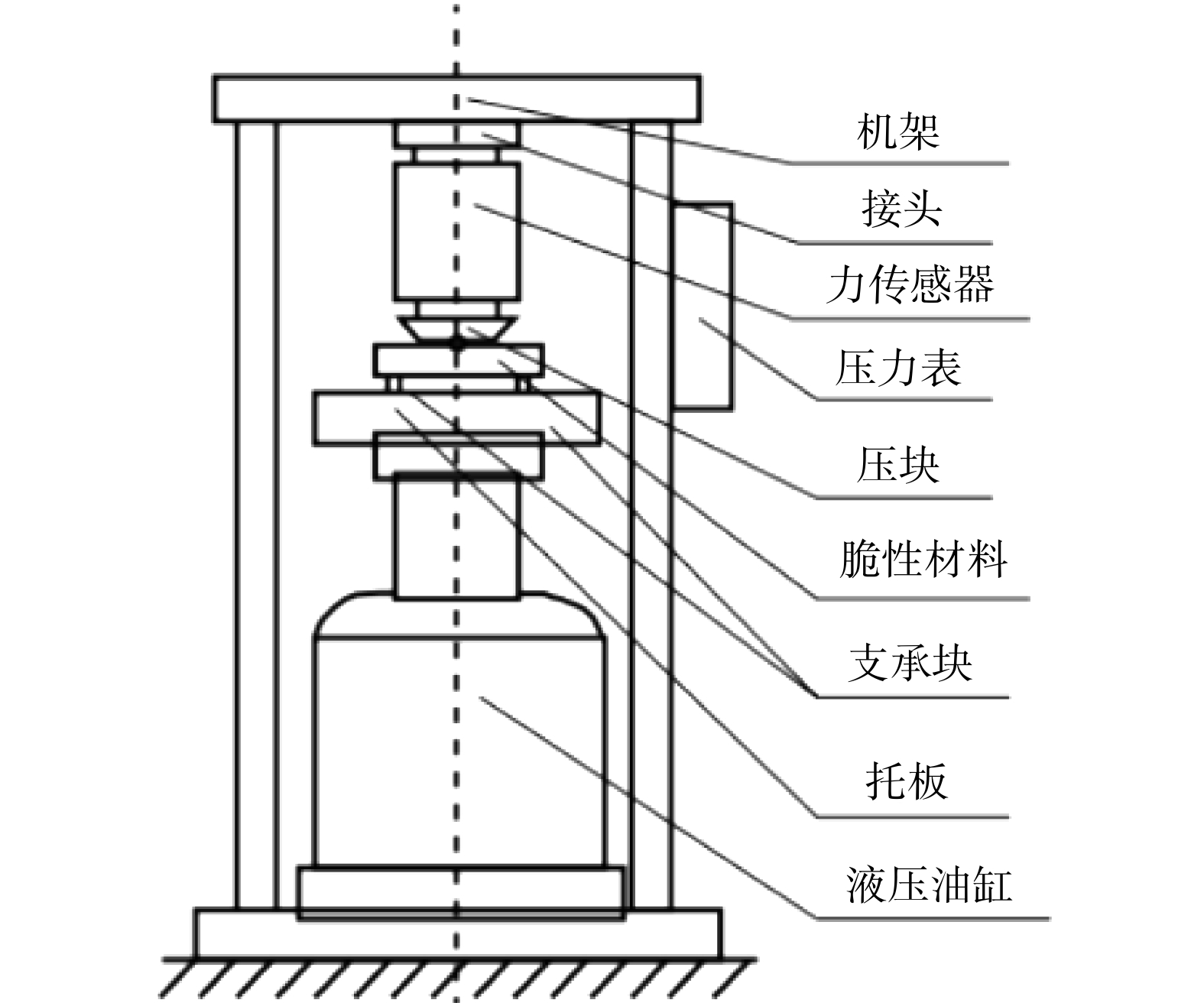
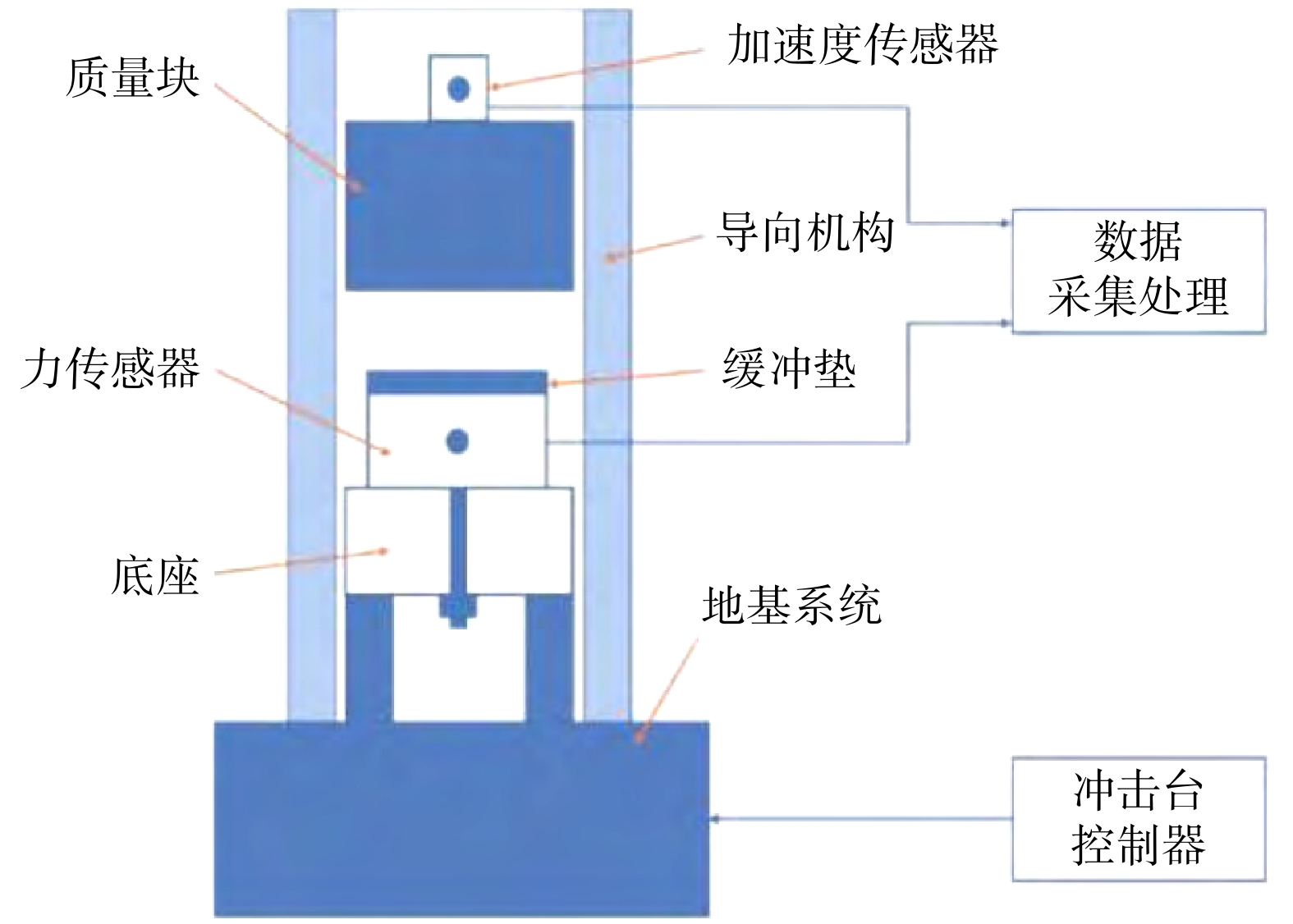
图 1 冲击响应法动态力校准装置
Figure 1. Impulse response method for dynamic force calibration device
-
[1] 李洋. 大尺寸模型气动力多点悬挂测量研究[D]. 大连: 大连理工大学, 2021. [2] 张军, 王郁赫, 任宗金, 等. 考虑角度偏差的压电三维力传感器标定[J]. 光学精密工程, 2023, 31(17): 2546-2554. [3] 徐家琪, 龙建勇, 孙炜, 等. 基于RF-GA的六维力传感器解耦方法[J]. 测控技术, 2020, 39(5): 28-35,68. [4] Sun Y J, Liu Y W, Liu H. Analysis calibration system error of six-dimension force/torque sensor for space robot [C]. IEEE. International Conference on Mechatronics and Automation: Tianjin, 2014. [5] Song A G, Wu J, Qin G, et al. A novel self-decoupled four degree-of-freedom wrist force/torque sensor[J]. Measurement, 2007, 40: 883-891. doi: 10.1016/j.measurement.2006.11.018 [6] 张见冈, 张军, 钱敏, 等. 压电石英六维力传感器的解耦研究[J]. 压电与声光, 2010, 32(3): 396-398. [7] 马俊青, 宋爱国, 吴涓. 三维力传感器静态解耦算法的研究与应用[J]. 计量学报, 2011, 32(6): 517-521. [8] 姚建涛, 侯雨雷, 姚建业, 等. 大量程预紧式六维力/力矩传感器及静态标定研究[J]. 仪器仪表学报, 2009, 30(6): 1233-1239. [9] 尹肖, 王宇, 杨军. 动态力校准技术评述[J]. 计测技术, 2015, 35(2): 6-10. [10] 商佳尚, 王宇. 动态力校准中需要规范的若干问题[J]. 计测技术, 2014, 34(2): 1-5. [11] 闫瑞, 骆昕, 赵强, 等. 基于LabVIEW的冲击法动态力传感器校准装置[J]. 计量科学与技术, 2021, 65(10): 54-57,62. [12] 张多利, 金龙学, 吴月明. 小力值拉力计检定装置设计[J]. 中国检验检测, 2023, 31(4): 31-32,102. [13] 段武斌. 大吨位六分力测量系统原位标定及数据处理方法研究[D]. 南京: 南京理工大学, 2009. [14] 李彦刚. 压电多维力传感器的静动态标定系统研究[D]. 重庆: 重庆大学, 2010. [15] 吕江山. 轨姿控火箭发动机多维推力测量研究[D]. 大连: 大连理工大学, 2022. [16] Park Yon-Kyu, Kumme Rolf, Kang Dae-Im. Dynamic investigation of a three-component force-moment sensor[J]. Measurement Science and Technology, 2002(13): 654-659. [17] 刘奕辰, 朱熀秋, 杨泽斌. 无轴承电机神经网络逆系统解耦控制关键技术发展综述[J/OL]. [2023-12-01]. http://kns.cnki.net/kcms/detail/41.1148.TH.20230822.1009.002.html. [18] 唐佳豪, 闻新, 王宁, 等. 基于神经网络的控制力矩陀螺自抗扰解耦控制[J]. 兵工自动化, 2023, 42(2): 35-41. [19] 张浩. 六极径向混合磁轴承优化设计及自抗扰解耦控制研究[D]. 镇江: 江苏大学, 2022. [20] 蒋毅恒, 李霄飞. 对角优势的分析与综述[J]. 电力情报, 2000(3): 8-11. [21] 孟晨, 蒋继乐, 郭斌, 等. 基于神经网络的扭矩传感器稳定性分析预测[J]. 计量科学与技术, 2022, 66(5): 8-14,68. [22] 包子阳, 余继周. 智能优化算法及其 MATLAB 实例[M]. 第 1 版. 北京: 电子工业出版社, 2016: 170-173. [23] 李阳, 张建, 程序. 神经网络和滞后变量回归的车载终端误差修正[J]. 计量科学与技术, 2023, 67(8): 48-53. [24] 周爱国, 曾智杰, 乌建中, 等. 风电叶片多点静力测试神经网络PID解耦控制[J]. 测控技术, 2021, 40(3): 123-129. [25] 王清华, 郭伟国, 徐丰, 等. 基于Hopkinson杆和人工神经网络的三轴冲击力传感器同步解耦标定方法[J]. 爆炸与冲击, 2022, 42(10): 87-98. [26] 张景柱. 特种六分力传感器设计原理研究[D]. 南京: 南京理工大学, 2008. [27] 陈宏伟, 卢文科, 左锋. 基于SSA-LSSVM模型的差动电感式位移传感器的温度补偿[J]. 仪表技术, 2023(6): 69-73. [28] 易智文. 基于优化经验模态分解和最小二乘支持向量机的边坡位移预测[J]. 江西水利科技, 2023, 49(5): 327-333. [29] 李华, 朱一民, 马海军, 等. 基于最小二乘支持向量机的小电流接地系统早期故障识别算法研究[J]. 电气工程学报, 2023, 18(3): 297-306. [30] 盛文娟, 娄海涛, 彭刚定. 基于最小二乘支持向量机和多参考光栅的可调谐滤波器解调误差动态补偿[J]. 光学学报, 2023, 43(7): 35-45. [31] Su J , Zhang Y N . Application of BP neural network optimization algorithm based on genetic algorithm in credit risk early-warning of commercial bank[C]. 13th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery, 2017. [32] Xie X L , Gao F , Huang X Y , et al. Numerical optimization of flow noises for mufflers based on the improved BP neural network[J]. Journal of Vibroengineering, 2016, 18(4): 1. [33] 秦媛. 粒子群算法改进及其应用研究[D]. 南京: 南京邮电大学, 2018. -

 下载:
下载:
 点击查看大图
点击查看大图
图(8)
计量
- 文章访问数: 120
- HTML全文浏览量: 30
- PDF下载量: 16
- 被引次数: 0

