 作者投稿
作者投稿 专家审稿
专家审稿 编辑办公
编辑办公

The Development of New Primary Standard for Positional Angles
-
摘要: 面向数控机床回转定位、航空航天器飞行姿态调控及测绘仪器空间定向领域,针对相关装备角度测量圆分度核心器件的量值传递需求,参照国家平面角计量器具检定系统要求,中国计量科学研究院研制并建立了新一代线角度基准装置。该装置通过超精密精密回转角定位、自校准扫描干涉式圆光栅测量、全圆连续补偿等一系列关键技术,实现了整分角度、细分角度一体化测量,及静态测量、扫描测量多种测量功能,测量范围达到b,采样步长优于0.01″,测量不确定度达到U=0.03″ (k=2),为圆分度角度测量仪器提供了全圆连续的量值溯源平台。Abstract: The National Institute of Metrology of China has developed a new primary standard for positional angles, catering to the needs of angle measurement in machine tool rotation positioning, aviation and aerospace attitude control, and spatial orientation in surveying instruments. This standard, aligned with the national verification scheme for plane angle measuring instruments, incorporates advanced technologies such as ultra-precise rotational positioning, self-calibrating scanning interferometry, and continuous full-circle compensation. It enables integrated measurement of both whole and subdivided angles, offering diverse functionalities like static and scanning measurements. This standard spans a measurement range of 0° to 360°, with a sampling step finer than 0.01″, and achieves a measurement uncertainty of U=0.03″ (k=2). It provides a continuous full-circle traceability platform for angle measuring instruments.
-
Key words:
- metrology /
- angle /
- primary standard /
- verification scheme
-
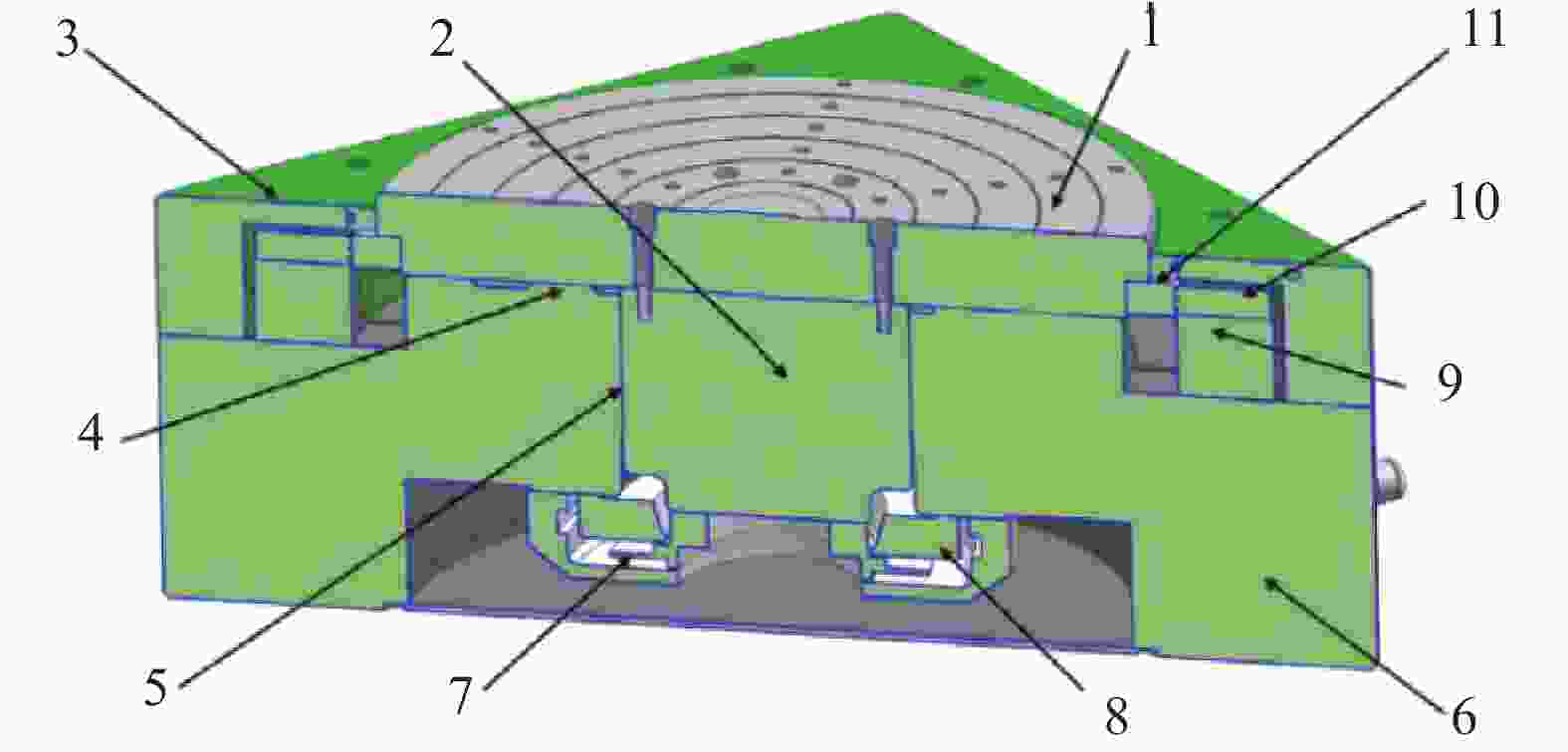
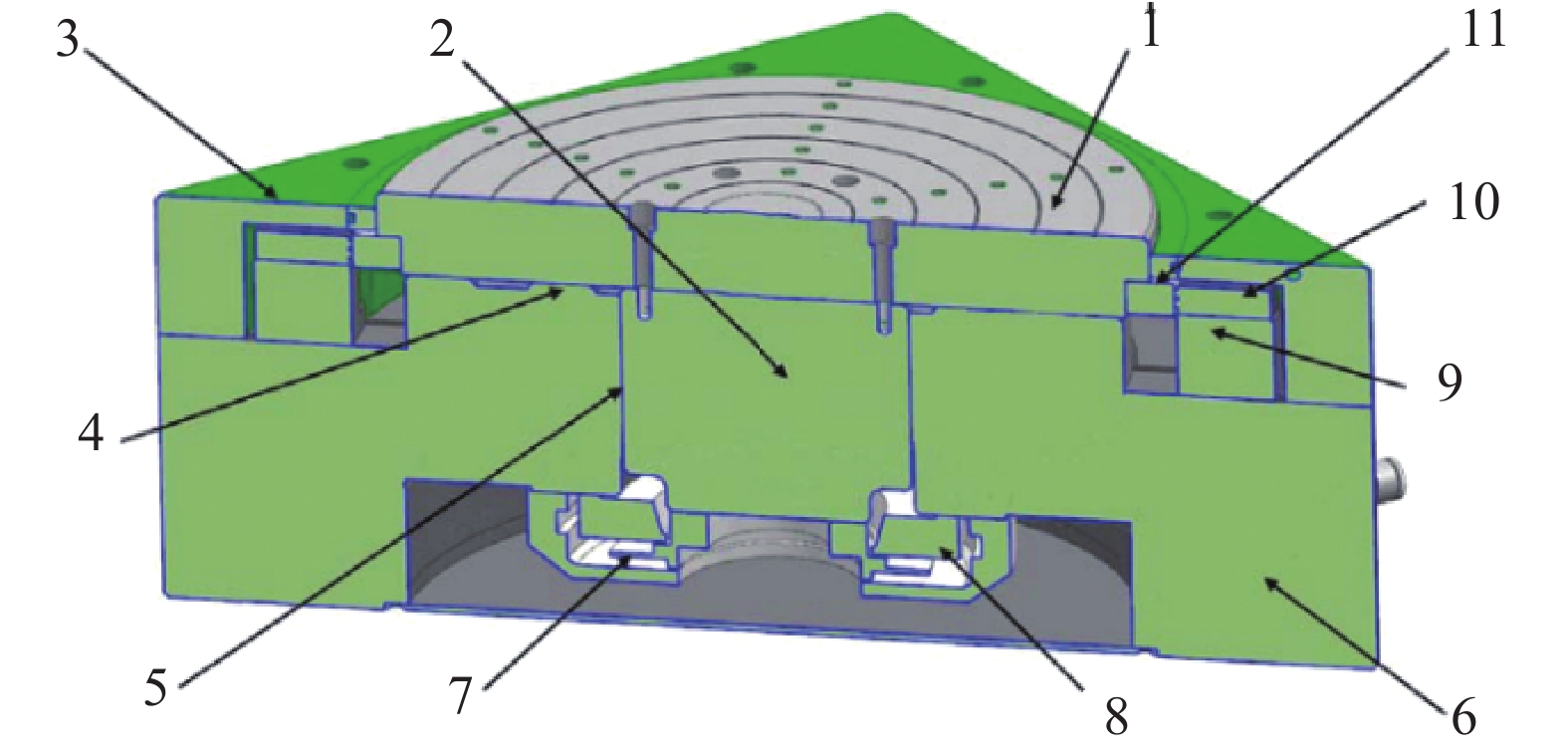
图 2 总体结构
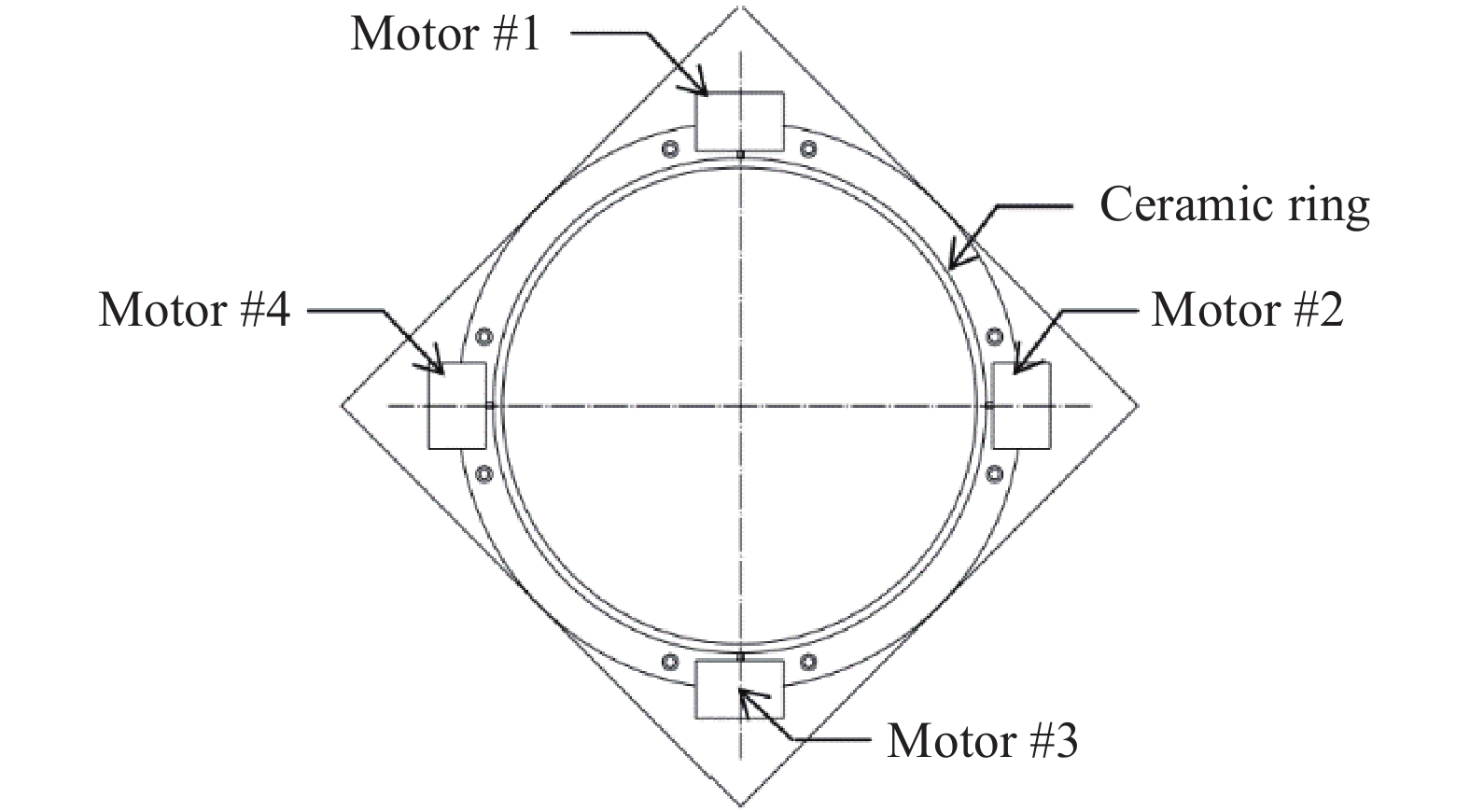
注:1 – 工作台面;2 – 主轴;3 – 保护壳;4 – 止推轴承气浮面;5 – 径向轴承气浮面;6 – 基座;7 – 光栅盘;8 – 读数头;9 – 驱动单元安装座;10 –压电电机;11 – 陶瓷环。
Figure 2. Overall structure
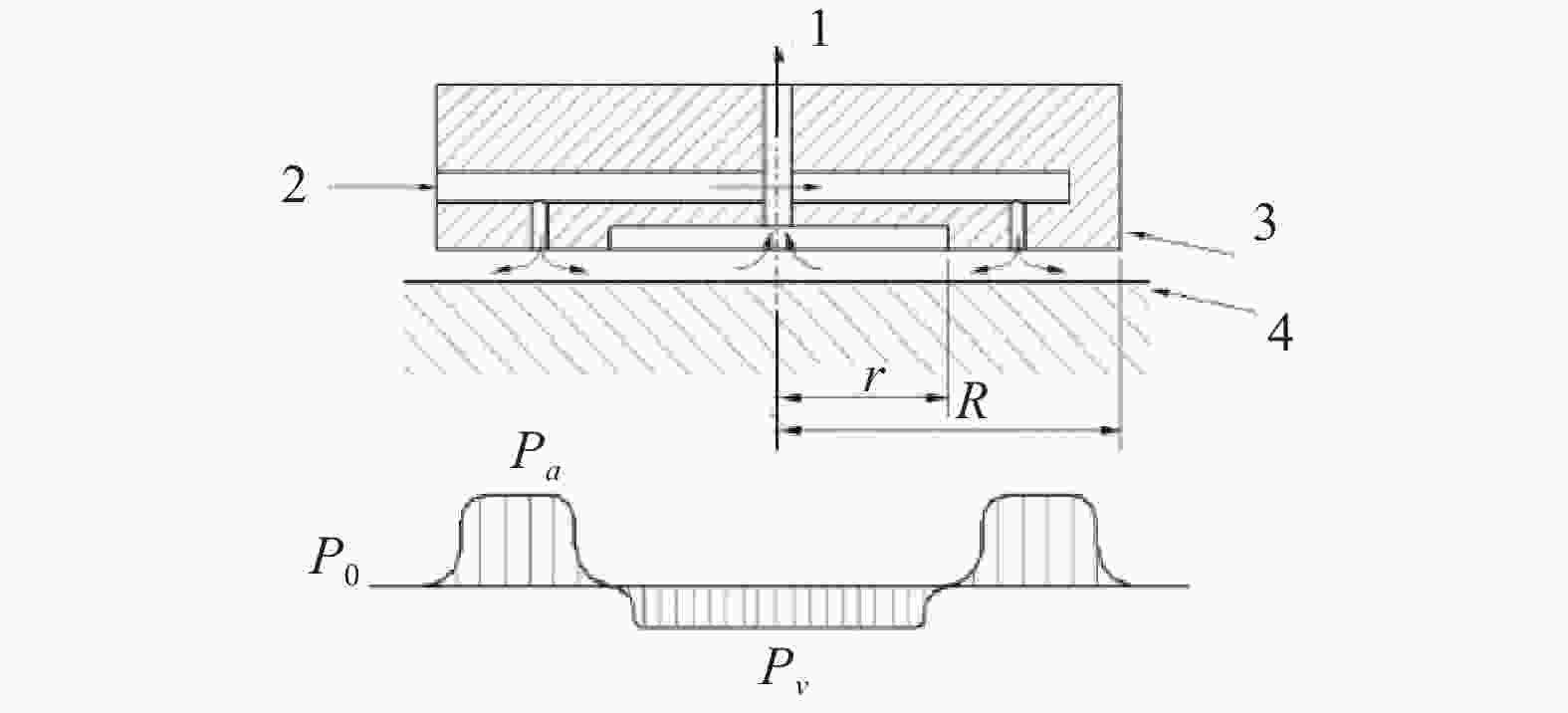
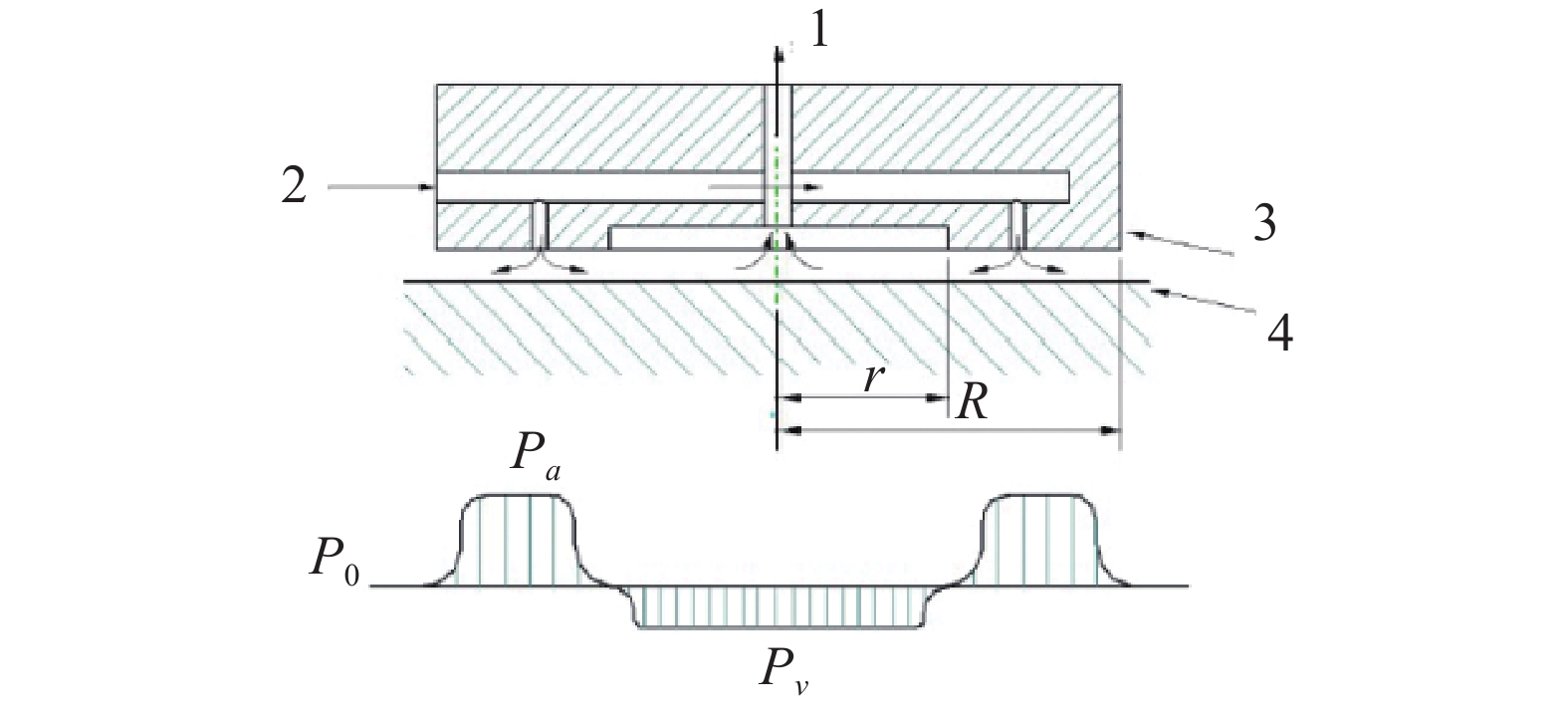
图 4 真空预载静压支撑轴系
注:1 – 真空抽气;2 – 高压气体;3 –气浮支撑工作面;4 –支撑平台工作面。
Figure 4. The vacuum preload air bearing system
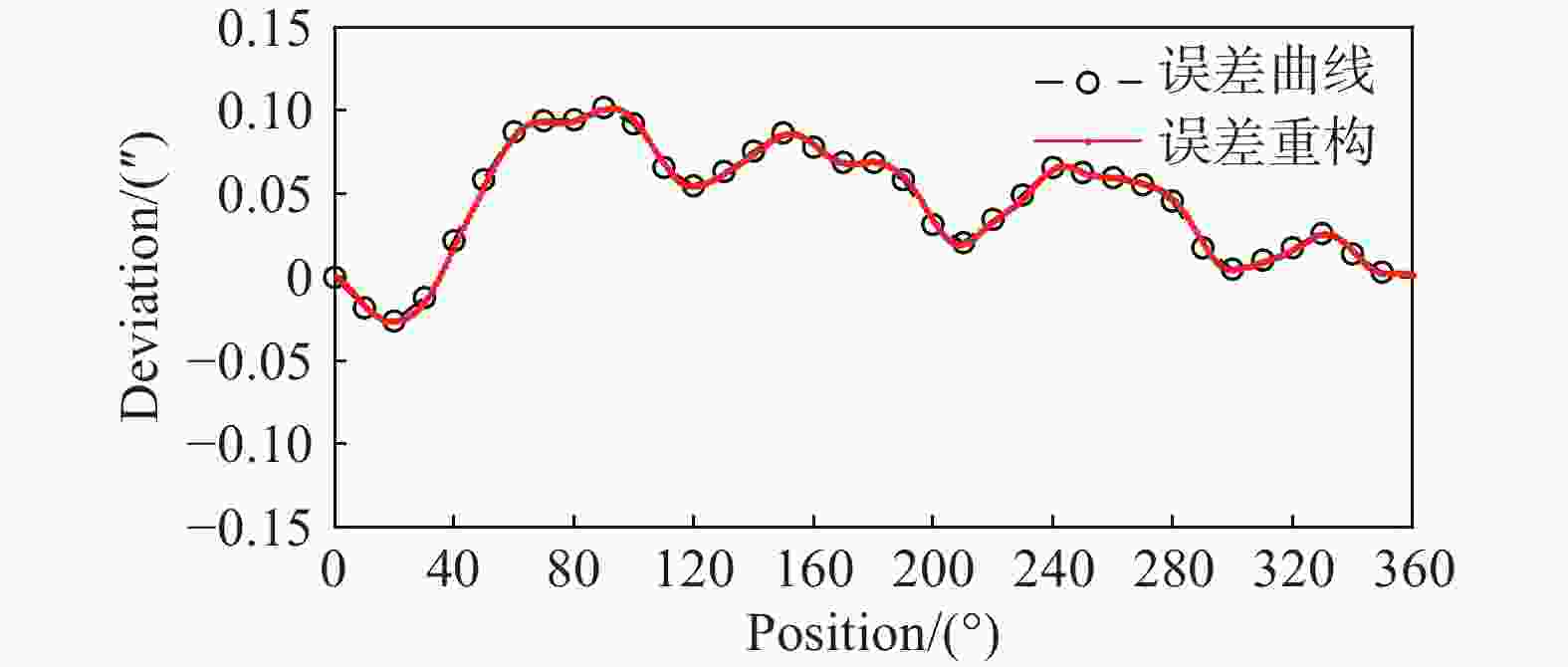
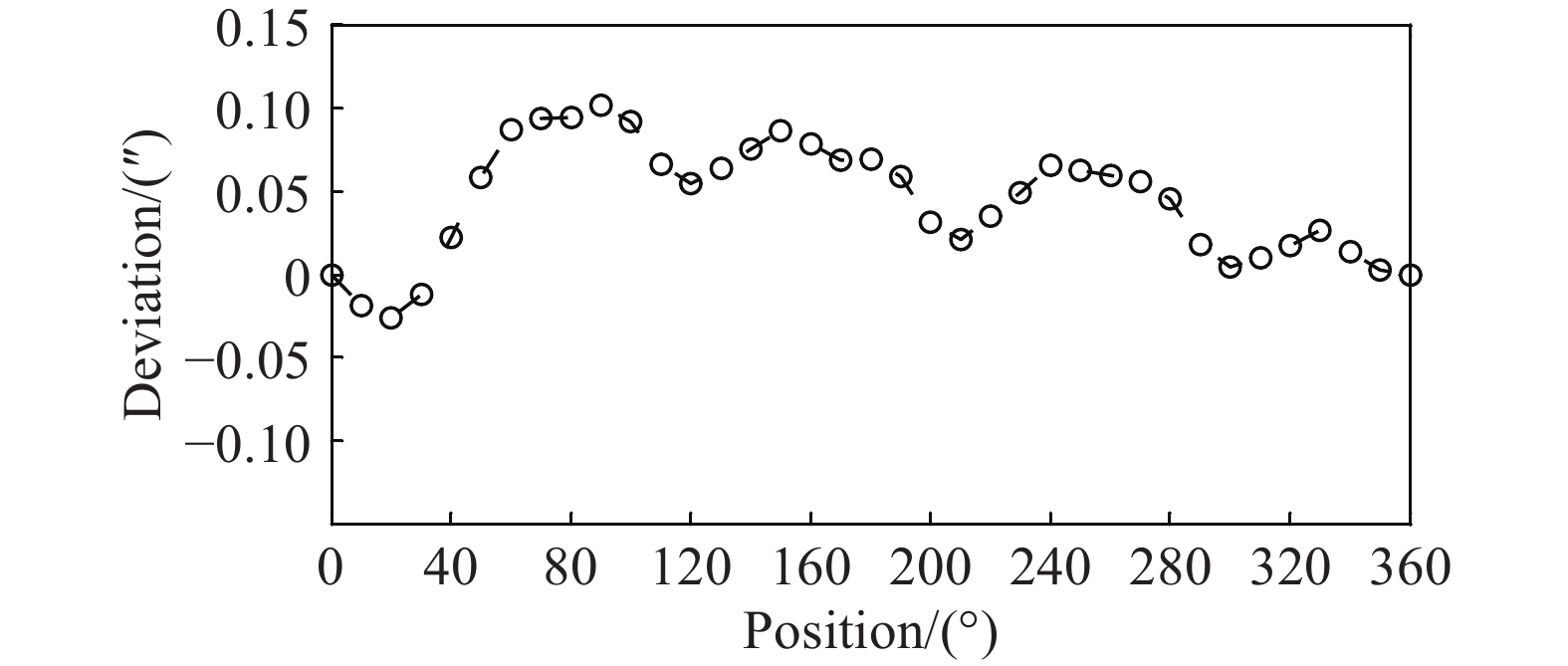
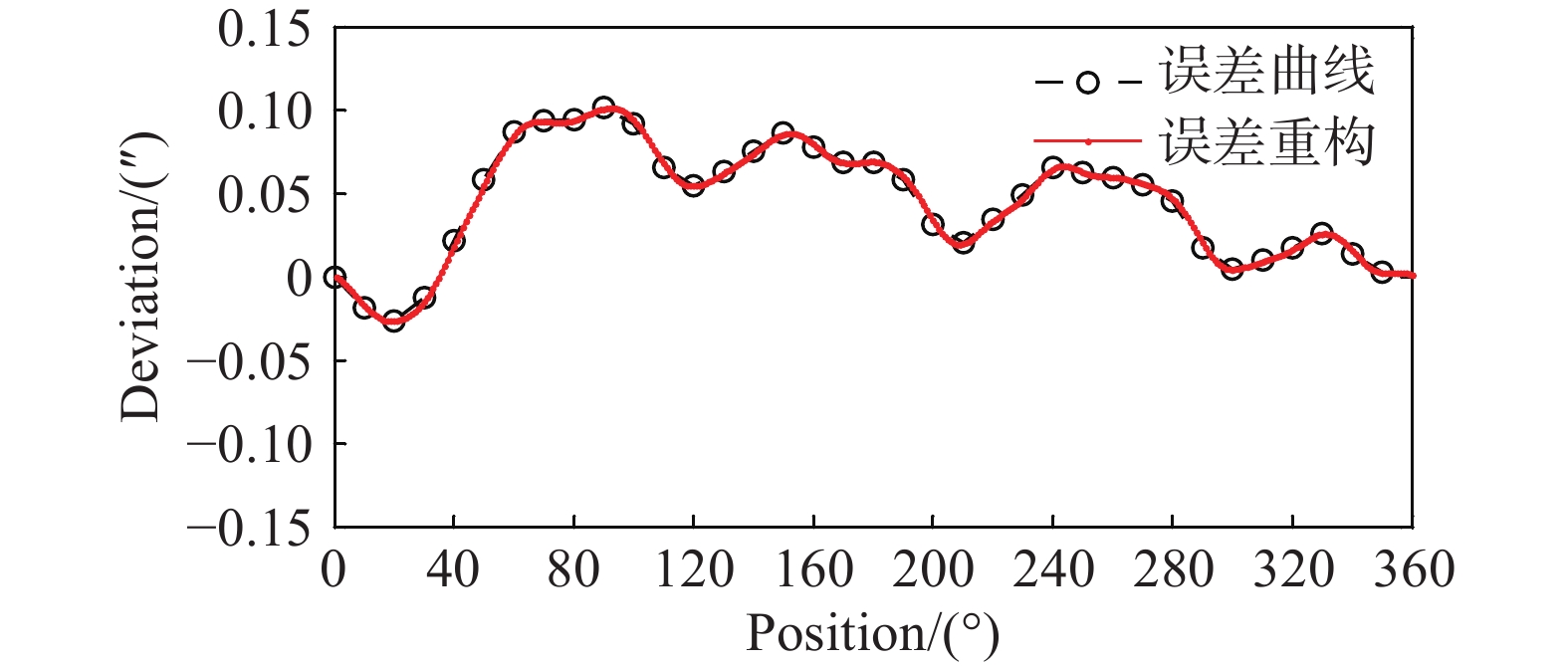
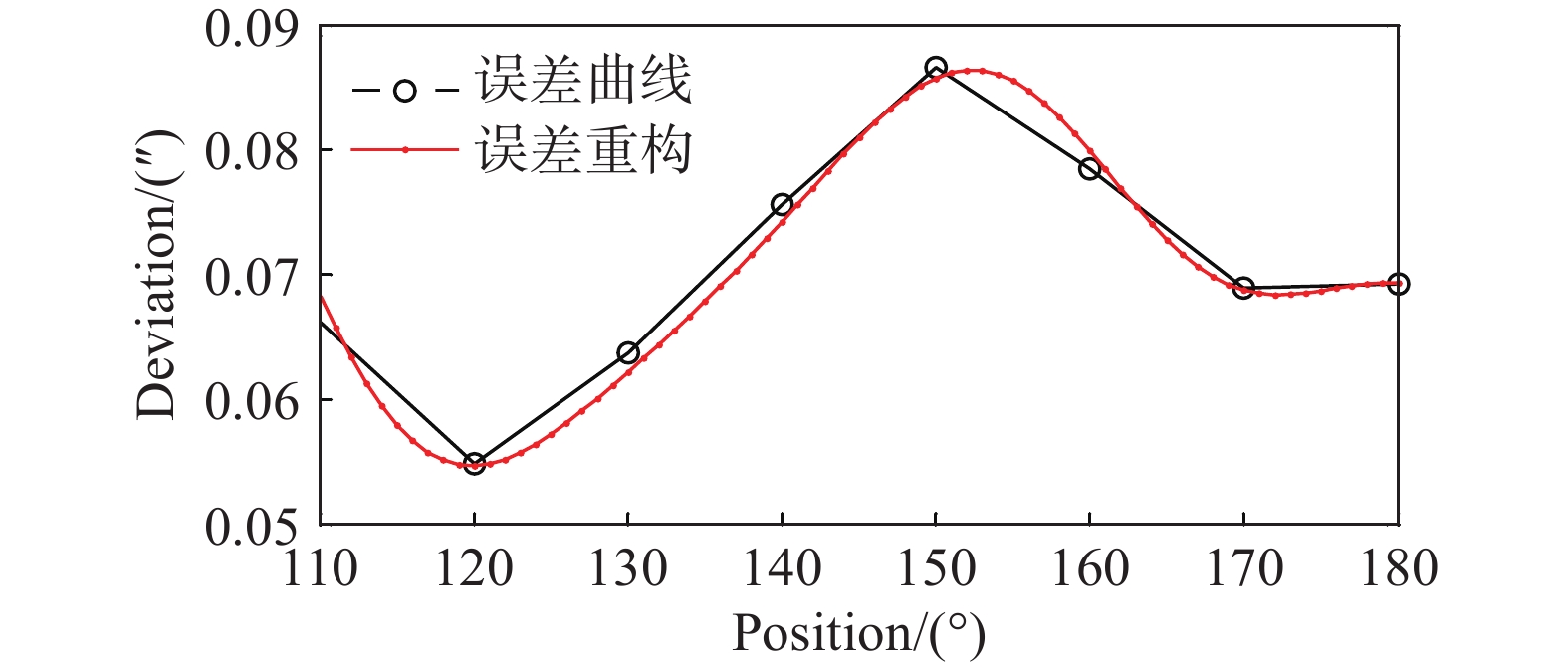
图 13 全圆连续补偿函数重构误差曲线与原误差曲线对比图
Figure 13. Comparison between the reconstructed deviation curve and the original deviation curve
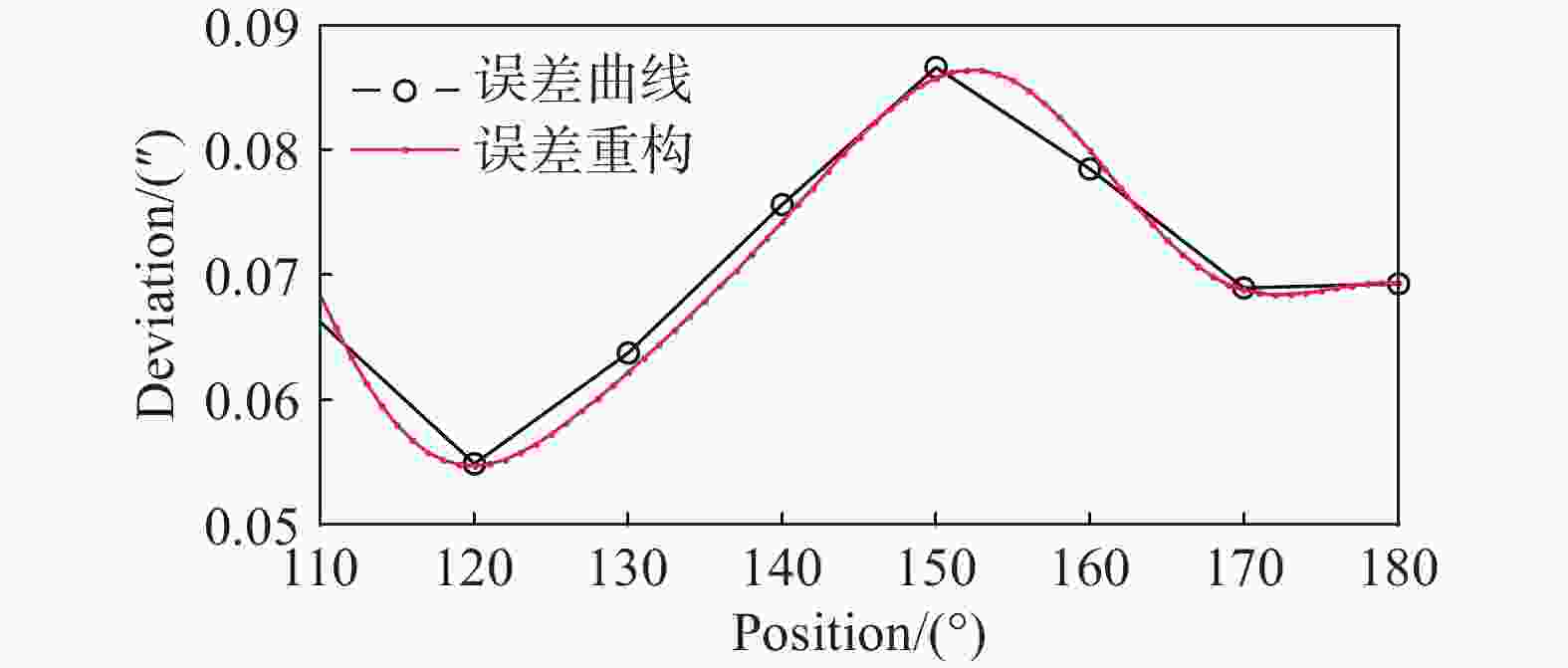
图 14 全圆连续补偿函数重构误差曲线与线性差分曲线细节对比
Figure 14. Detailed comparison between the reconstructed deviation curve and the linear fitting deviation curve
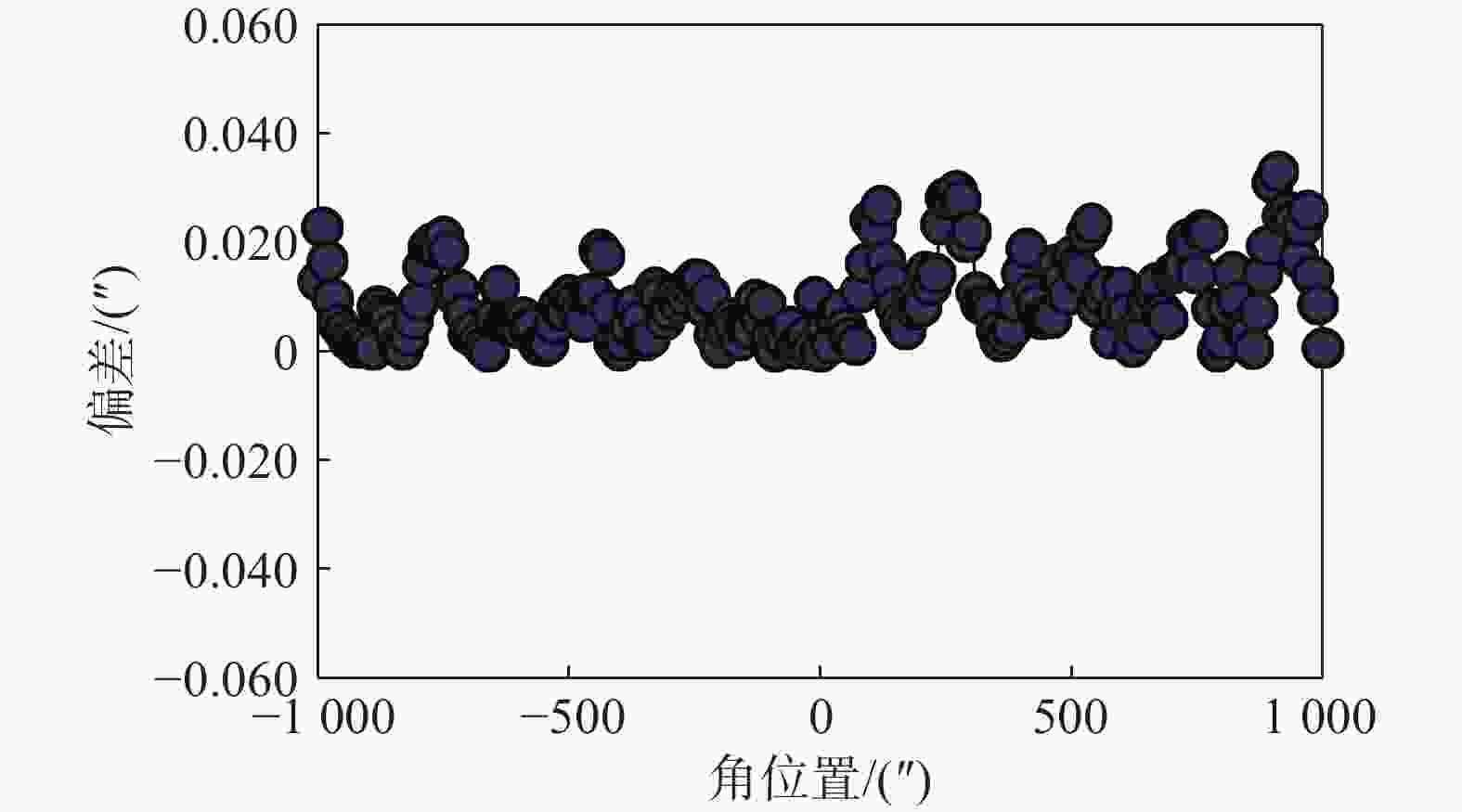
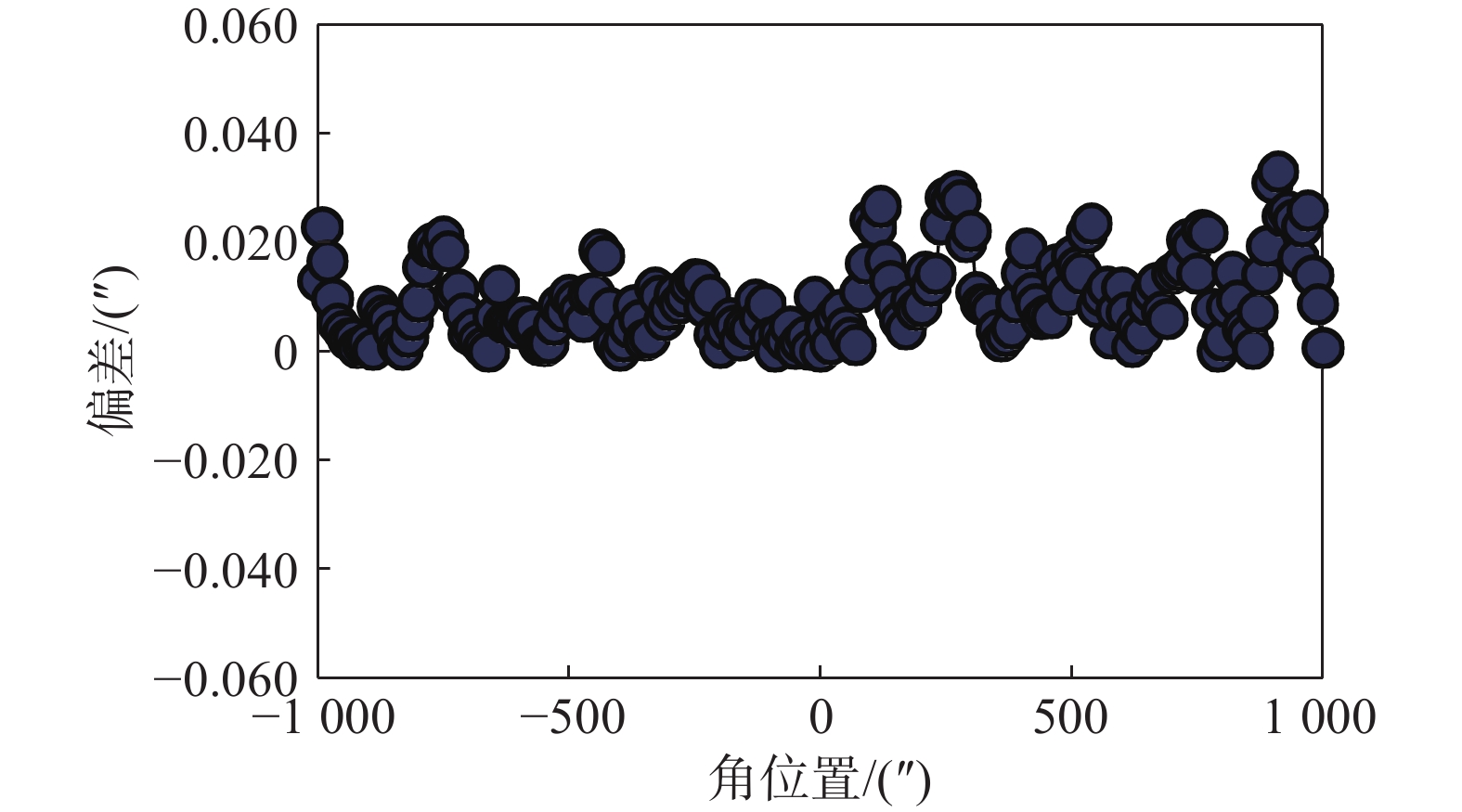
图 15 激光小角度基准装置和线角度基准装置对自准直仪校准结果偏差绝对值
Figure 15. The absolute deviation in autocollimator calibration results between the primary standard for small angles and the primary standard for positional angles
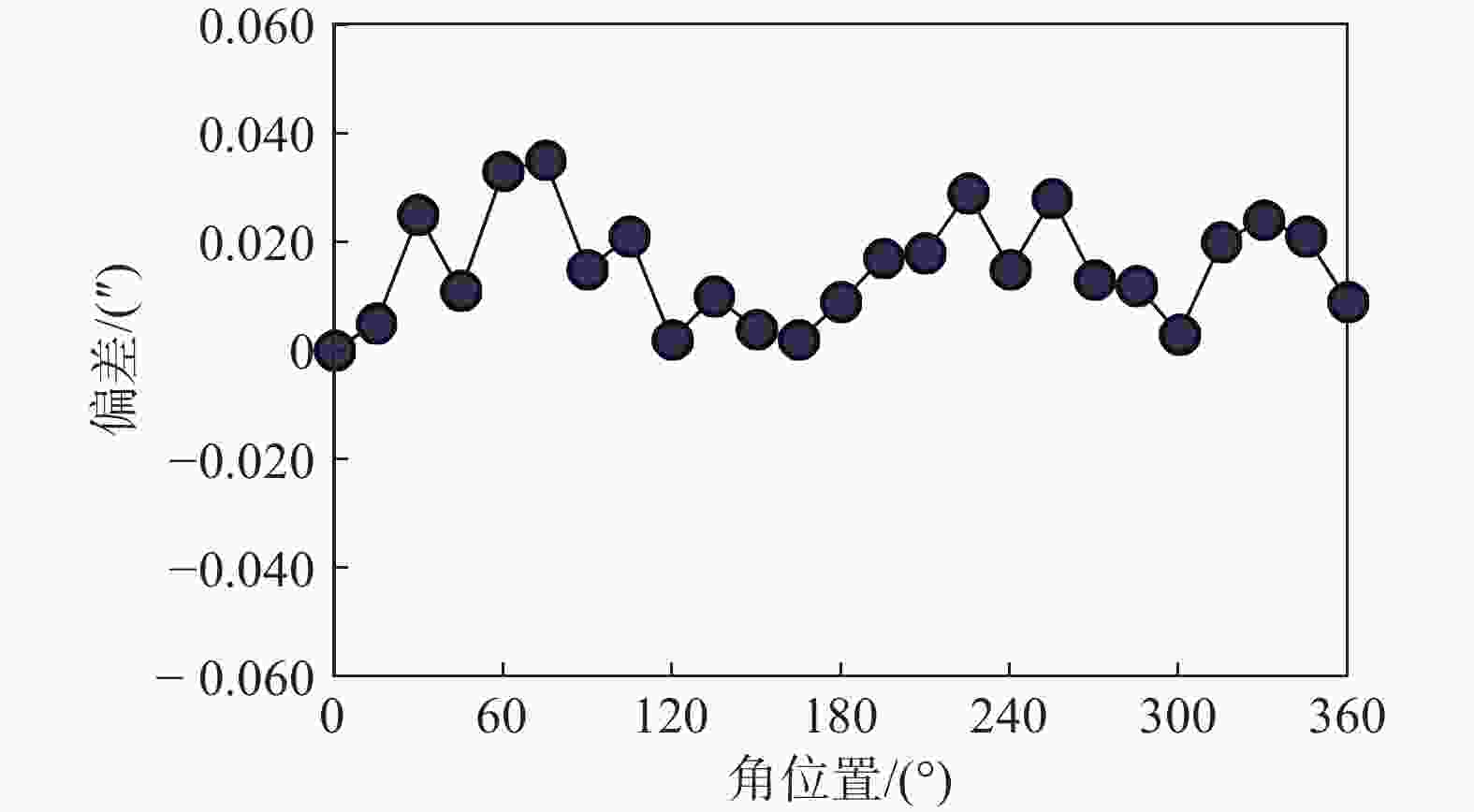
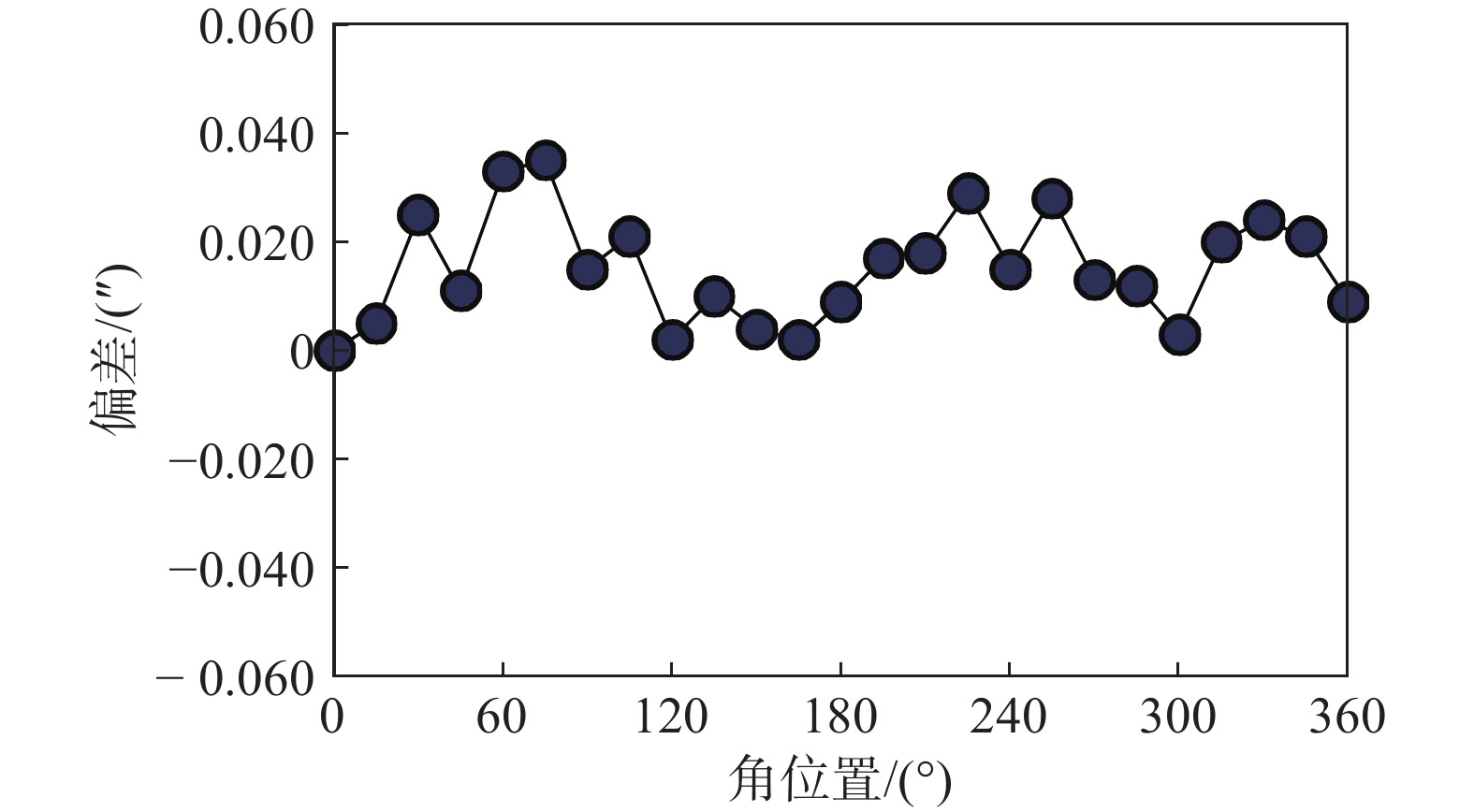
图 16 多齿分度台基准装置和线角度基准装置对正多面棱体校准结果偏差绝对值
Figure 16. The absolute deviation in polygon calibration results between the primary standard for index tables and the primary standard for positional angles
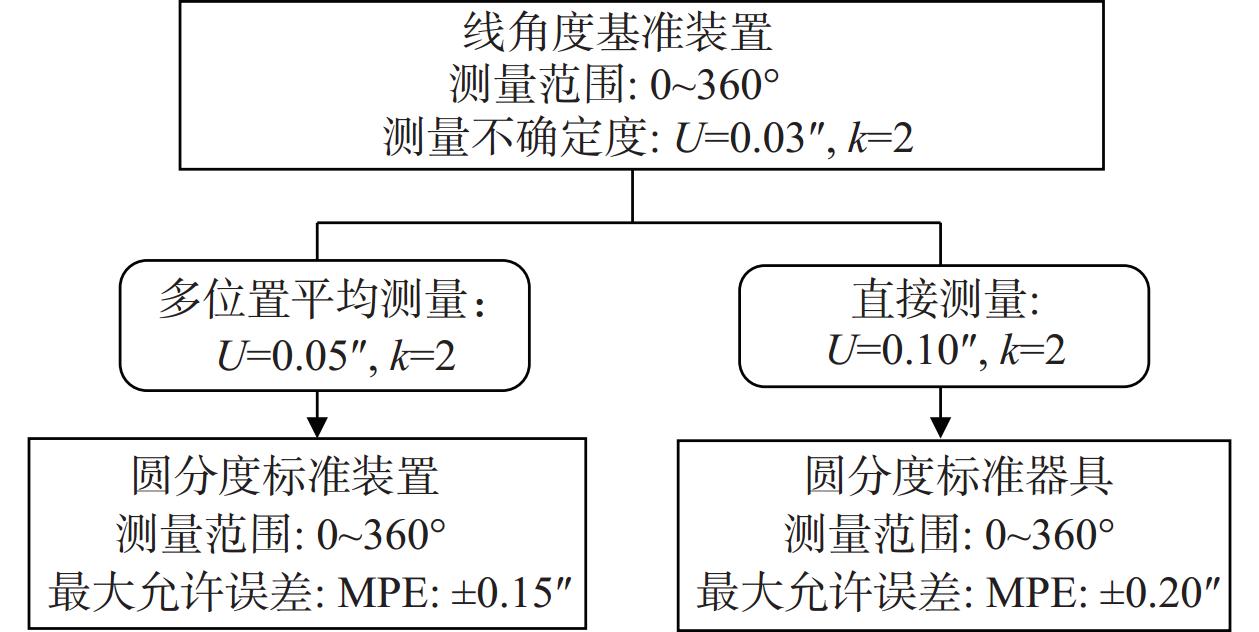
图 17 线角度基准装置量值传递框图
Figure 17. The quantity dissemination diagram of the primary standard for poitional angles
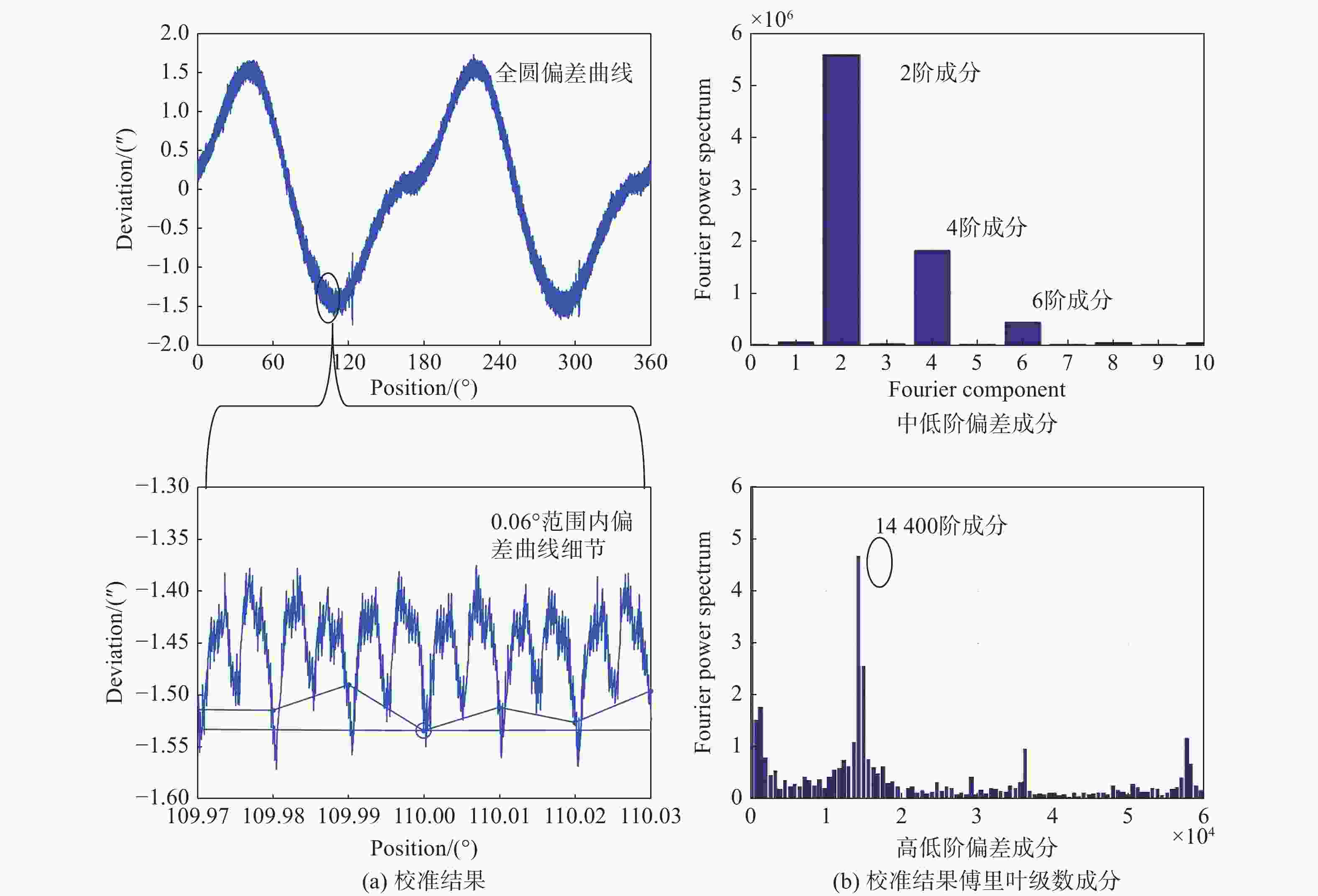
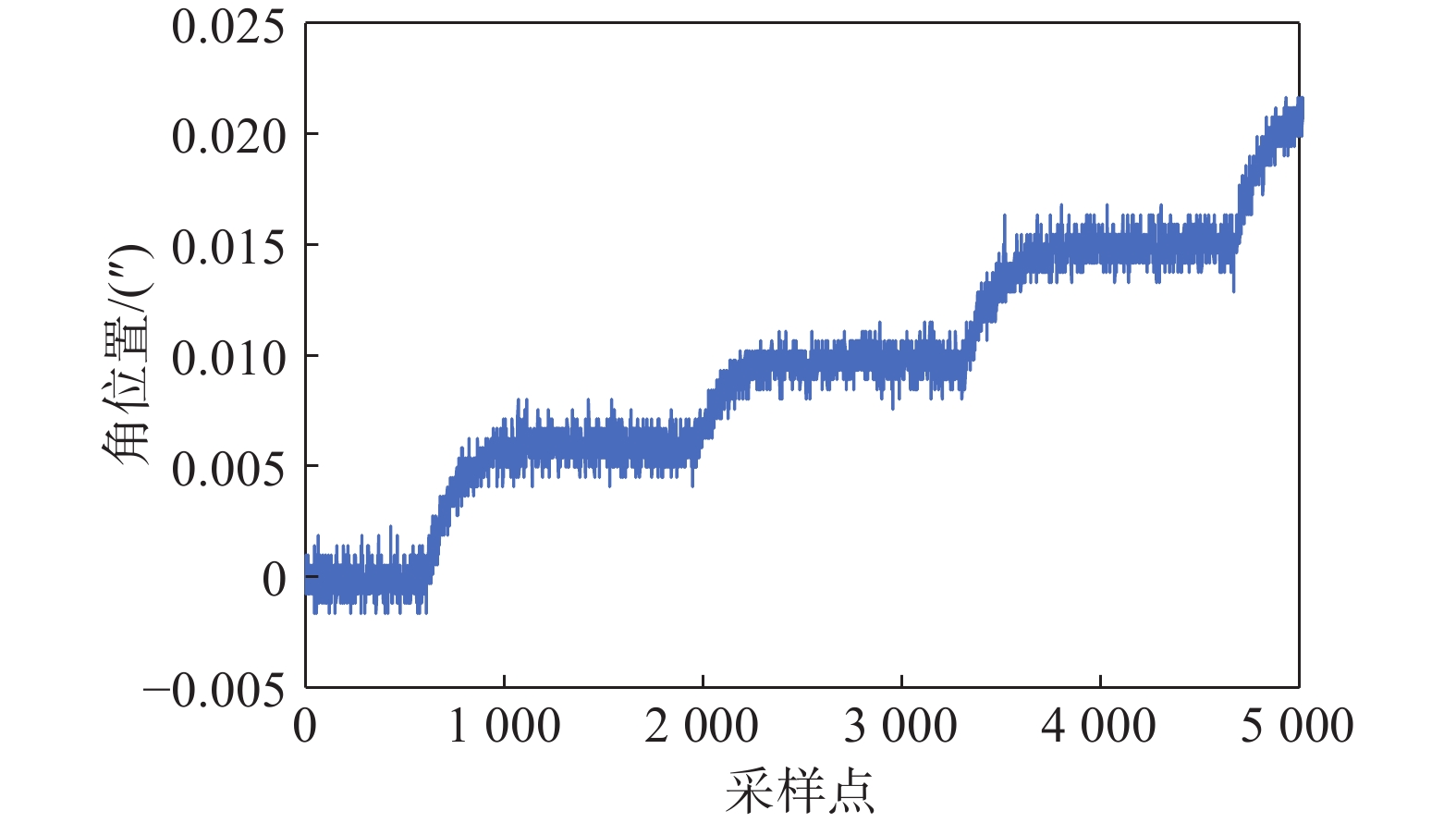
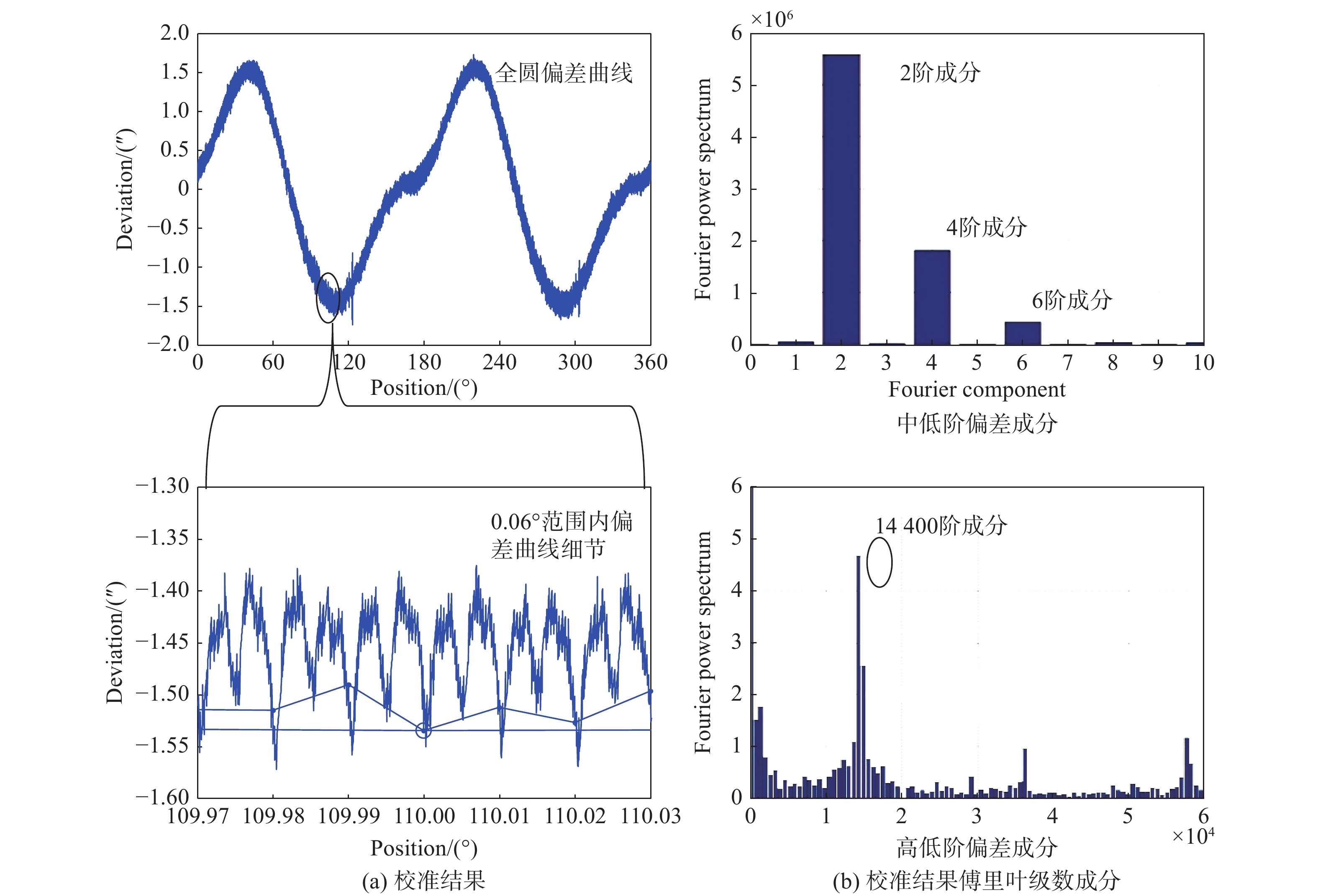
图 18 线角度基准装置高分辨力校准结果
Figure 18. High-resolution calibration results of the primary standard for positional angles
表 1 轴系技术指标
Table 1. Specifications of the bearing system
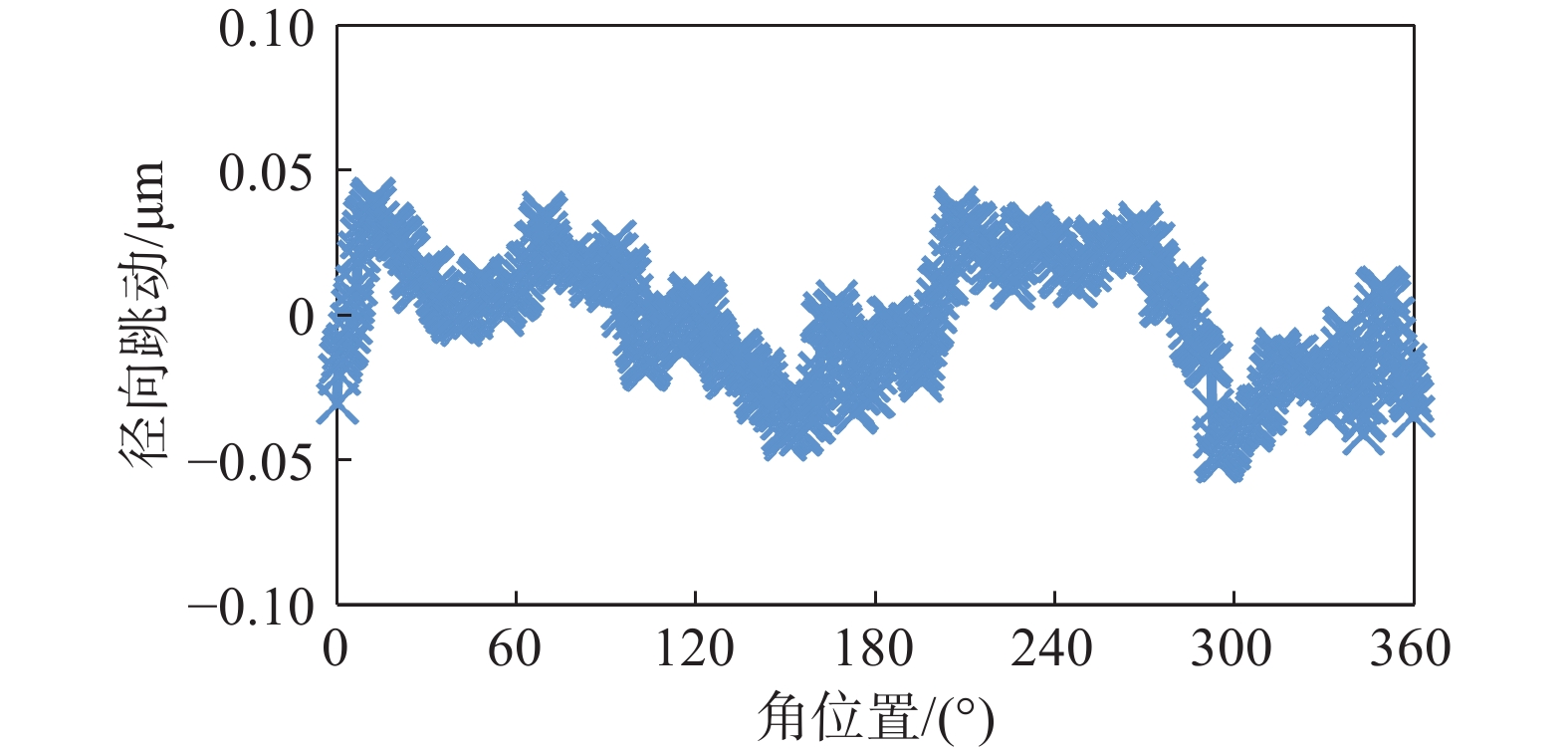
项目 指标 1 总体尺寸 360 mm×360 mm×200 mm 2 整机重量 130 kg 3 台面回转直径 320 mm 4 承载能力 20~50 kg 5 最大转速 6 rpm 6 径向跳动 50 nm 7 轴向跳动 50 nm  下载: 导出CSV
下载: 导出CSV
表 2 Comp测量不确定度分量表
Table 2. The uncertainty components of Comp
序号 来源 来源特征 符号 1 未分离的谐波分量引入的测量不确定度(>18阶且满足4×j阶,j=1,2,3,…) 4读数头等分平均和谐波补偿函数不包含的谐波成分引入的测量不确定度 L 2 轴系不封闭引入测量不确定度(轴系随机跳动和摆动) 不满足误差谐波分离理论要求引入的测量不确定度 P
下载: 导出CSV
表 3 测量不确定度概算表
Table 3. The budget of the measurement uncertainty
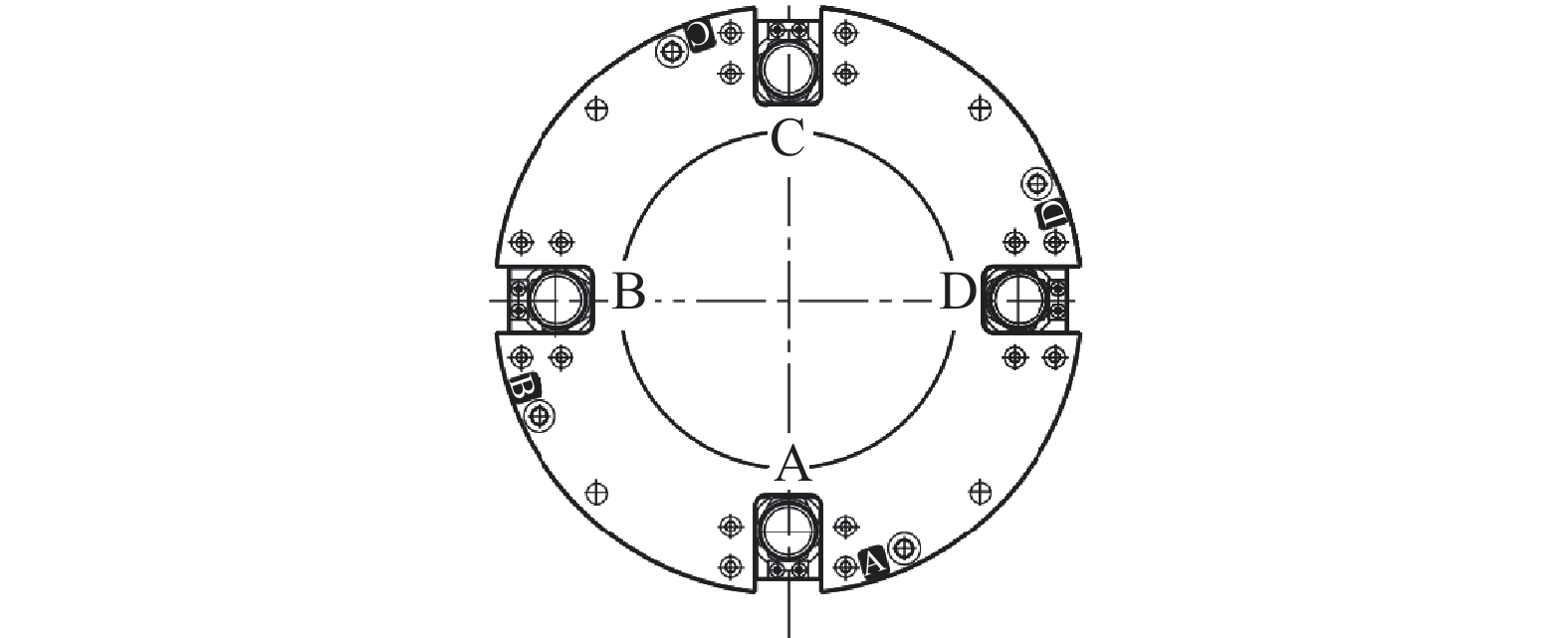
序号 来源 标准测量不确定 灵敏系数 1 u(Md1) 0.020″ 1/4 2 u(Md2) 0.022″ 1/4 3 u(Md3) 0.022″ 1/4 4 u(Md4) 0.022″ 1/4 5 u(L) 0.006″ 1 6 u(J) 0.009″ 1
下载: 导出CSV
表 4 平面角度基准装置计量性能
Table 4. Specifications of the primary standard for plane angle
名称 测量范围 测量不确定度 激光小角度基准装置 −3°~+3° Us=0.03″,k=2 −5°~+5° Us=0.05″,k=3 多齿分度台基准装置 0~360° Ui=0.05″,k=3 线角度基准装置 0~360° Up=0.03″,k=2
下载: 导出CSV
-
[1] Huang Y, Xue Z, Huang M, et al. The NIM continuous full circle angle standard[J]. Measurement Science and Technology, 2018, 29(7): 74013. doi: 10.1088/1361-6501/aac6a6 [2] Watanabe T, Kon M, Nabeshima N, et al. An angle encoder for super-high resolution and super-high accuracy using SelfA[J]. Measurement Science and Technology, 2014, 25(6): 065002. doi: 10.1088/0957-0233/25/6/065002 [3] R Probst, R Wittekopf, M Krause, et al. The new PTB angle comparator[J]. Meas. Sci. Tchnol, 1998, 9: 1059-1066. doi: 10.1088/0957-0233/9/7/009 [4] Tsukasa Watanabe, Hiroyuki Fujimoto, Tadashi Masuda. Self-Calibratable Rotary Encoder[J]. Journal of Physics Conference Series, 2005, 13: 240-245. doi: 10.1088/1742-6596/13/1/056 [5] Jong-Ahn Kim, Jae Wan Kim, Chu-Shik Kang, et al. Precision angle comparator using self-calibration of scale errors based on the equal-division-averaged method[J]. MacroScale Proceedings, 2011, 1: 1 [6] M Pisani, M Astrua. The new INRIM rotating encoder angle comparator (REAC)[J]. Meas. Sci. Tchnol, 2017, 28: 045008. doi: 10.1088/1361-6501/aa5af6 [7] A. Just, M Krause, R Probst, et al. Calibration of high-resolution electronic autocollimators against an angle comparator[J]. Metrologia, 2003, 40: 288. doi: 10.1088/0026-1394/40/5/011 [8] 王汉斌, 黄垚, 薛梓, 等. 激光小角度基准测量不确定度评定[J]. 计量学报, 2019, 40(6): 970-974. doi: 10.3969/j.issn.1000-1158.2019.06.05 [9] 乔丹, 薛梓, 黄垚, 等. 等分多读数头位置偏差对测角误差的影响研究[J]. 计量学报, 2017, 38(6): 676-680. doi: 10.3969/j.issn.1000-1158.2017.06.04 [10] BIMP. 关键比对数据库(KCDB) [DB/OL].https://www.bipm.org/exalead_kcdb. [11] 国家质量监督检疫总局. 平面角计量器具检定系统表: JJG 2057-2006[S]. 北京: 中国标准出版社, 2006. -



 点击查看大图
点击查看大图

计量
- 文章访问数: 254
- HTML全文浏览量: 80
- PDF下载量: 26
- 被引次数: 0

