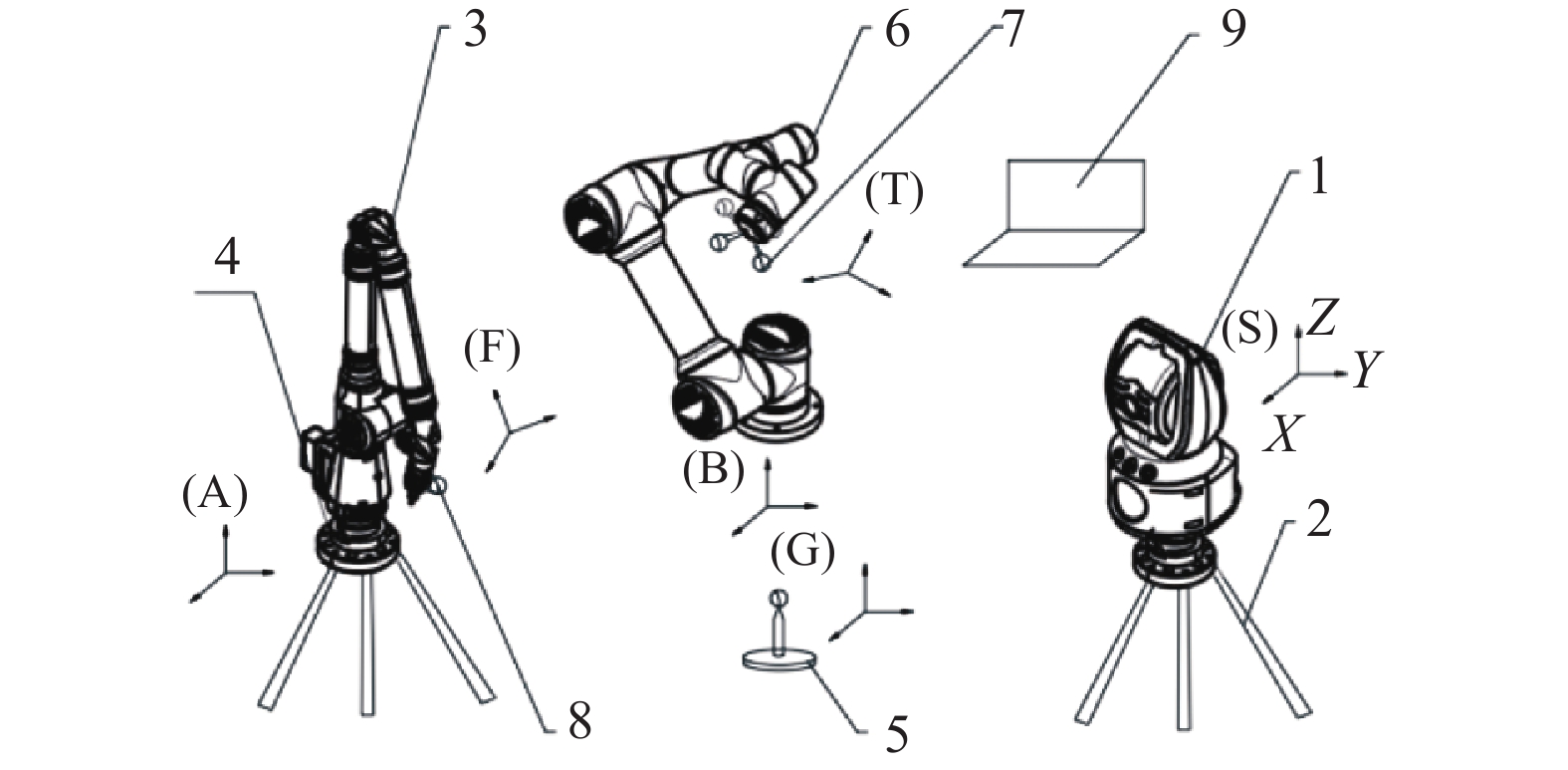
| Citation: | HUANG Lei, DOU Yanhong, FAN Yu, HE Zhichao, ZHANG Shuang, ZHANG Liqiu, ZHANG Bo. Development of a Robot Position and Attitude Measuring System Based on a Laser Tracker and an Articulated Arm Coordinate Machine[J]. Metrology Science and Technology, 2022, 66(1): 26-31. doi: 10.12338/j.issn.2096-9015.2021.0005

|

| [1] |
任瑜, 张丰, 郭志敏, 等. 利用Leica激光跟踪仪对工业机器人现场标定的方法[J]. 计量技术, 2019, 543(11): 64-68.
|
| [2] |
任国营, 王为农, 苏永昌, 等. 激光跟踪仪动态参数自动测试系统设计[J]. 计量学报, 2008, 29(2): 114-116.
|
| [3] |
温秀兰, 崔俊宇, 芮平, 等. 激光跟踪仪现场校准设备相关问题探讨[J]. 计量技术, 2017, 523(1): 36-38.
|
| [4] |
董琳. 6R型工业机器人精度分析与结构参数标定的研究[D]. 哈尔滨: 哈尔滨工业大学, 2017.
|
| [5] |
童洋洋. 6R型工业机器人标定技术研究及算法实现[D]. 合肥: 合肥工业大学, 2017.
|
| [6] |
任永杰, 邾继贵, 杨学友, 等. 利用激光跟踪仪对机器人进行标定的方法[J]. 机械工程学报, 2007, 43(9): 195-200. doi: 10.3321/j.issn:0577-6686.2007.09.038
|
| [7] |
任永杰. 测量机器人本体标定技术要求[D]. 天津: 天津大学, 2007.
|
| [8] |
李定坤, 叶声华, 任永杰, 等. 机器人定位精度标定技术的研究[J]. 计量学报, 2007, 28(3): 224-227.
|
| [9] |
赵学峰. 机器人动态追踪系统的标定技术研究[D]. 马鞍山: 安徽工业大学, 2019.
|
| [10] |
赵海鹏, 杜玉红, 丁娟, 等. 移动机器人中激光雷达测距测角标定方法[J]. 红外与激光工程, 2019, 11(6): 371-378.
|
| [11] |
张晓平. 六轴自由度关节型机器人参数标定方法与实验研究[D]. 武汉: 华中科技大学, 2013.
|
| [12] |
魏霖. 多关节坐标测量机的坐标转换和参数标定[J]光电工程, 2007, 34(5): 57-61.
|
| [13] |
于连栋, 程文涛, 费业泰. 基于激光跟踪仪的关节式坐标测量机参数标定[J]. 中国科学技术大学学报, 2009, 39(12): 1329-1332.
|
| [14] |
温瑞. 六自由度测量机器人误差分析与仿真[D]. 西安: 西安理工大学, 2008.
|
| [15] |
谷乐丰, 杨桂林, 方灶军, 等. 一种新型机器人自标定装置及其算法[J]. 机器人, 2020, 42(1): 1-3.
|
| [16] |
李瑞峰, 候琪琳, 陶谦. 机器人末端工具参数自动标定方法[J]. 哈尔滨工业大学学报, 1998, 30(2): 74-76.
|
| [17] |
国家质量监督检验检疫总局. 工业机器人性能规范及其试验方法: GB/T 12642-2013[S]. 北京, 2014.
|
Figures(7) / Tables(1)

Supported by:
Beijing Renhe Information Technology Co. Ltd


 Submit
Submit Review
Review Office
Office

 DownLoad:
DownLoad:






